Вторая схема.... Где Ик датчики.... Там резистор подстраивается длину передачи....
Можете вообще расписать какие подстрочные резисторы за что отвечаю... уже второй день сижу не понимаю как настроить...
Добавлено (15.03.2011, 23:00)
---------------------------------------------
А всё понял...
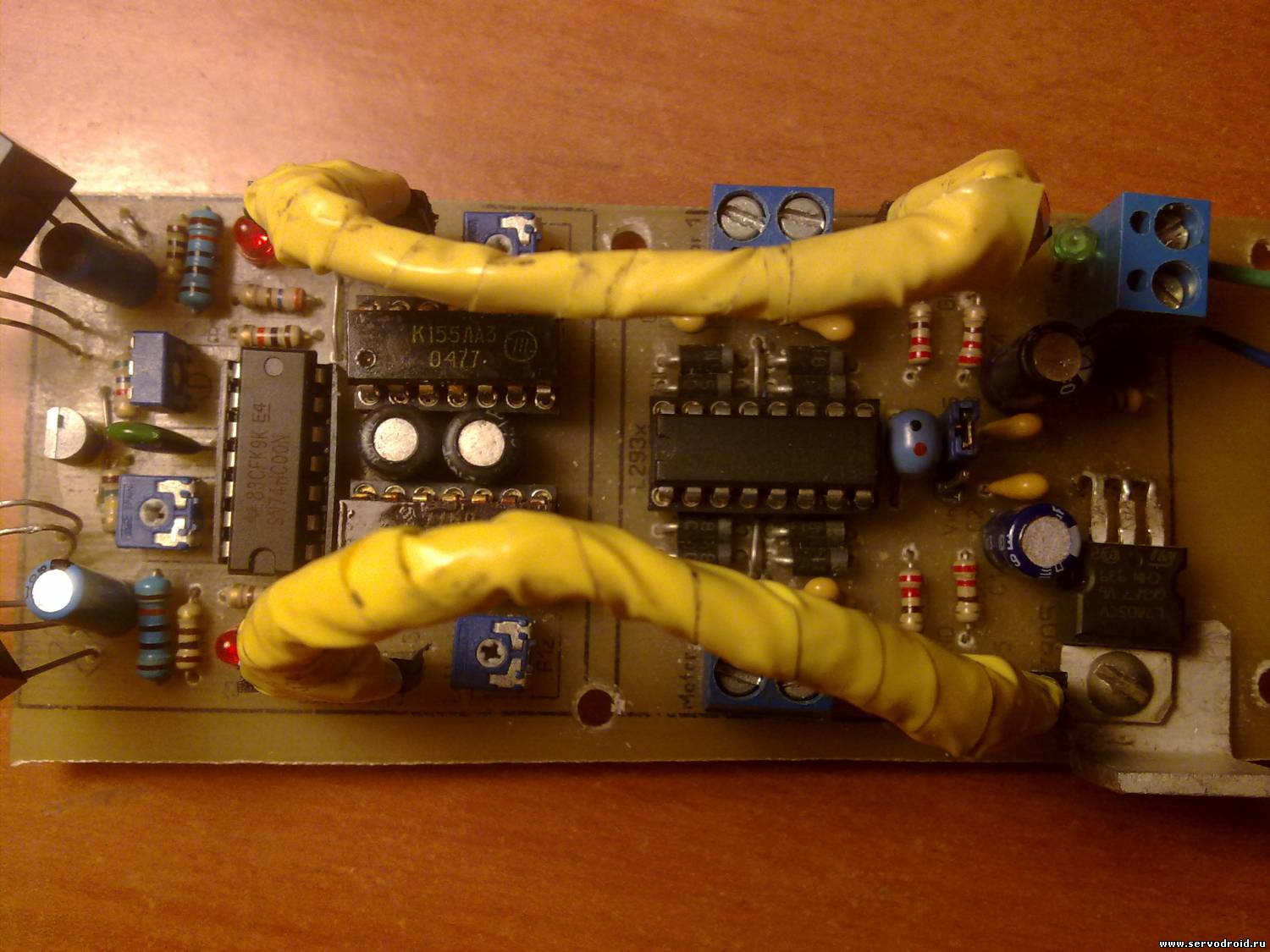
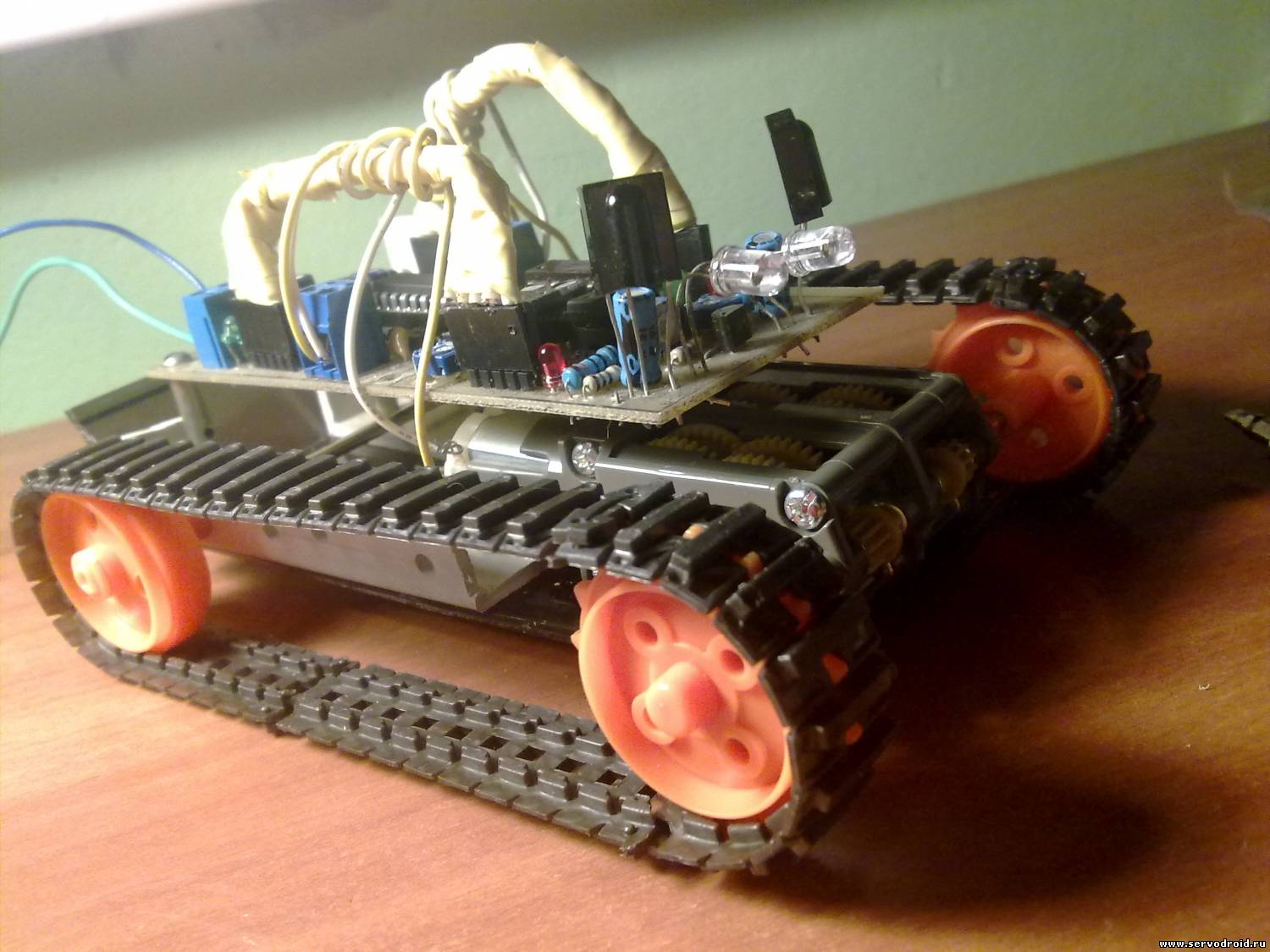
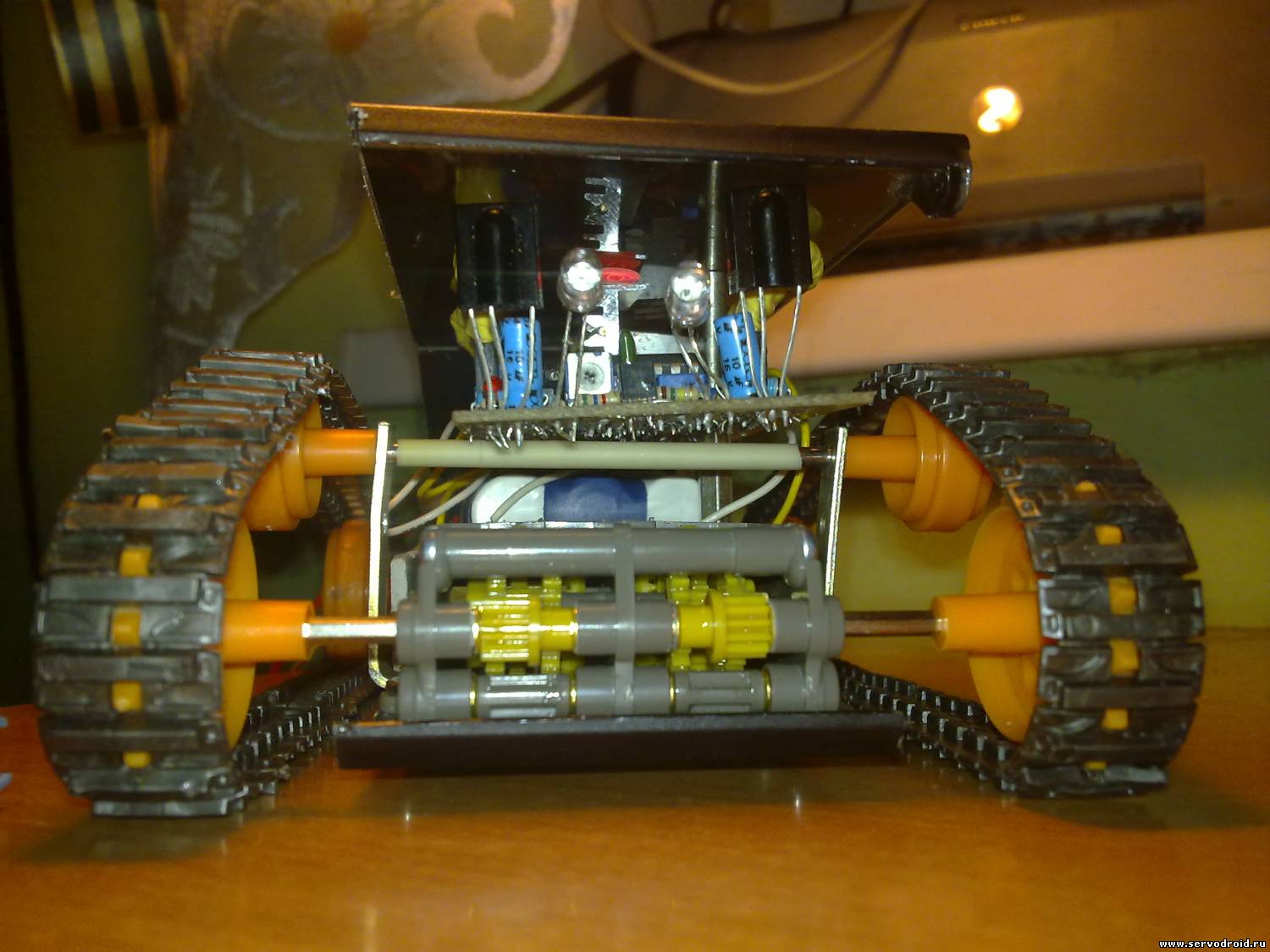
Микросхема 74НС00 формирует пачки импульсов, которые принимает TSOP. В ответ на полученные импульсы с генератора, TSOP вырабатывает сигнал, но сигналы получается короткими. Для того чтобы нам сделать сигналы длиннее мы собрали расширитель импульсов на двух микросхемах К155ЛА3. Длину сигнала мы можем регулировать подстроечными резисторами. Это нам нужно для того, чтобы робот, приблизившись к препятствию, отворачивал от ннего на определенный угол. Наш расширитель тоже формирует сигнал, этот сигнал уже идет на микросхему L293D, и управляет двигателями.
Добавлено (16.03.2011, 08:09)
---------------------------------------------
И можете пожалуйста ещё кое-что ответить...
Какие детали(Выходы ножек) Отвечаю за то что бы робот поворачивался на определённый угол??
Что нужно сделать что бы этот поворот увеличит?














 )
)