|
Шагающий робот своими руками
|
|
Администраторы
3417 сообщений
Мужчина
|
Фотография шагающего робота. Робот работает по прицепу "нейронных сетей". Схема давольно таки не оченьс сложная, так что повторить можно. Печатную плату сделаю в процессе обсуждений этой темы.

Схема

Quote Чтобы разобраться в том, что не работает нужно взглянуть на исходную схему, по которой велась сборка и немного её проанализировать. Как видно на электрической схеме моторы подключены напрямую через микросхему 74HC245. Эта микросхема двунаправленный шинный формирователь с 3-мя состояниями на выходе. Управляя потенциалом на ноге 1 меняем направление передачи сигнала. Управляя потенциалом на ноге 19 разрешаем или запрещаем прохождение сигнала. Для разрешения прохождения используется как ни странно лог.0.
В схеме ходока 74HC245 используется в качестве драйвера для 3х моторов. Микросхема 74HC245 разделяет моторы и многофазный генератор и не даёт влиять трём моторам на генерацию импульсов на выходе 6 инверторов.
Микросхема 74HC245 не рассчитана на большой ток, её нагрузочные способности смехотворны, всего 20мА ! и это заметьте в "холостом" режиме, когда нет торможения вала мотора из-за трения или усилий при соприкосновении с поверхностью! Малейшее усилие на вал мотора и микросхема не выдержит.
Теперь об усилиях. Роботы типа walker (ходоки) для передвижения по поверхности должны развивать на валу мотора (и тем более на конечностях) большие усилия, до нескольких кг! На видео можно рассмотреть, что робот не может сдвинуться с места, так как не хватает усилия из-за малых токов! Нужно ставить после (или вместо) 74HC245 усилитель тока на транзисторах. Если подключать по схеме эмиттерного повторителя, то потребуется 12 транзисторов.
-------------------------------------------------------------------------------------------------------------------------------------------- ----------------------------------
Далее о вялом старте. За блокировку "ног" отвечает резистор сопротивлением 2Мом и конденсатор 2,2мкф, а также инвертор U2a. При зарядке конденсатора на выходе инвертора U2a положительный потенциал закрывает по входу 19 мс 74HC245. Так вот, чем больше ёмкость конденсатора и сопротивление резистора, тем дольше будет блокироваться 74HC245. Чтобы уменьшить это время до приемлемого, нужно уменьшить сопротивление резистора до 1Мом, а ёмкость конденсатора до 0,1мкф. Одновременно этот резистор , конденсатор и инвертор формируют запускающий импульс на многофазный генератор из 6 инверторов.
Вообще то хочется поставить твёрдую двойку тем кто рисовал исходную схему, так как нет ни буквенных обозначений ни общепринятой логики обозначений!
Кстати взгляните на первоначальное фото робота собранного за рубежом. В нём установлены редкие моторы (вряд ли такие можно купить). Их особенность в очень малом потреблении тока и гигантском усилии развиваемым валом. В общем заграничный робот первоначально был собран на редких моторах и схеме работающей на грани фола. Схема "сырая" повторять не советую!
5420146.png
(4.4 Kb)
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
А можешь объяснить как она работает и что за микросхема 74HC245?
Еще что за wait motor?
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Quote (nightmare) как она работает
- моторы крутятся то в одну сторону, то в другую, тем самым он передвигается.
Quote (nightmare) что за микросхема 74HC245?
- пробей по чип дипу
Quote (nightmare) Еще что за wait motor?
-этот мотор двигает передние лапы, которые двигаются ввкпх-низ, вперед-назад
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Вот эти "усы" непосредственно на вал двигателя насажены?
Что-то не понятно про центральный двигатель.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
nightmare,
блин, как тебе объяснить...смотри:
Задний мотор отвечает за талкание робота вперед. Передний двигающийся "мост" состоит из двух моторов. В спокойном состоянии(когда робот не уперается в препятсятвие) работает только тот мотор, который отвечает за движение лап вверх-вниз. Как только робот доходит до препятствия, включается второй мотор, он отвечает за то, чтобы передняя часть, могла продвигаться вперед(как задние лапы).
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Короче средний мотор используется для поворота?
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Средний мотор работает для того, чтоб робот смог свою клешню переднюю вперед просунуть
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Аааа, понятно..
А задняя часть только вперед продвигает, а не вверх/вниз, так?
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Quote (nightmare) А задняя часть только вперед продвигает, а не вверх/вниз, так?
да, только в перед толкает. 
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Кстати, а где здесь нейронная сеть?
Судя по схеме здесь просто несколько одновибраторов...
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Незнаю, так писалось когда-то Добавлено (11.05.2010, 15:24)
---------------------------------------------
пп не желаешь сделать ?
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Не, не желаю
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
сам сделаю тогда
|
|
|
|
|
|
Модераторы
211 сообщений
Мужчина
|
Нейронной сетью зарубежные собратья по разуму называют RC-цепочку плюс инвертор микросхемы, включенные определённым образом. Прежде чем повторять робот изображённый на фото советую подобрать моторы. Именно с моторами и возникнут проблемы. Здесь моторы не обычные из под детских игрушек, а низкооборотные и развивающие большие усилия. Обыкновенные моторы не потянут, так как они высокооборотные и слабосильные. Обычно для таких роботов любители используют переделанные сервомашинки фирмы Futaba и др. Там либо движки стоят на редкоземельных магнитах (читай очень сильные и низкооборотистые) либо редукторы с понижением частоты вращения. В принципе можно взять любой движок с диапазоном от 3 до 10 вольт и через редуктор подключить к нему ноги, тогда он пойдёт.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
я давно пробовал просто каркас с движками и лапами, у меня тяжеловат вышел, но опыта маловато было тогда 
Добавлено (06.11.2011, 11:34)
---------------------------------------------
Так, все же надо осуществить мечту детства и собрать этого робота. Моторчики есть пололушные, думаю их вполне хватит.
Поехал на ЮНОНУ за деталями )
Добавлено (08.11.2011, 22:16)
---------------------------------------------
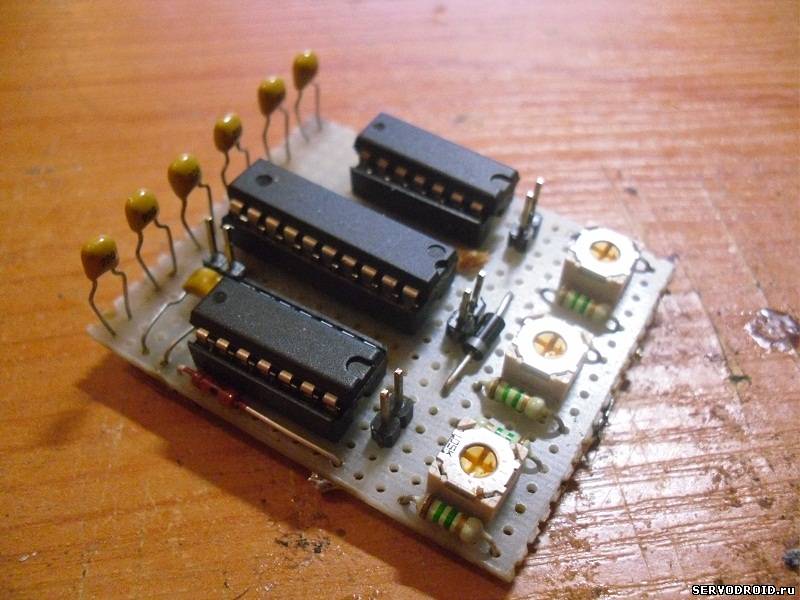
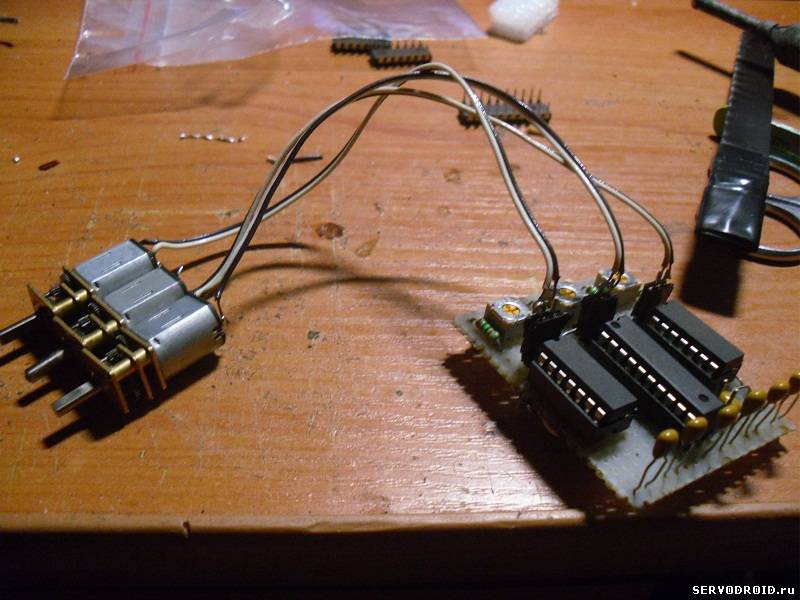
Схему собрал. Вот пара фотографий:
Призом в конце пайки мне достался сникерс ^ ^
5384807.jpg
(531.2 Kb)
·
1287110.jpg
(570.7 Kb)
·
0855125.jpg
(527.4 Kb)
·
8694274.jpg
(527.9 Kb)
·
0184679.jpg
(561.7 Kb)
·
7174781.jpg
(165.3 Kb)
|
|
|
|
|
|