Теперь в нашем онлайн-магазине доступна уникальная книга «BEAM-робототехника. От азов до создания практических устройств», идеально подходящая как для кружков робототехники, так и для самообучения дома. Вы можете приобрести её по привлекательной цене в 699 рублей. Дополнительная информация о книге доступна на нашем сайте. Также в ассортименте нашего онлайн-магазина представлены готовые наборы для сборки роботов, с помощью которых ваш ребенок сможет легко собрать своего первого робота, следуя нашим подробным инструкциям. Перейти в магазин
- Именно этот робот втянул меня в робототехнику. Когда я лазил по сайтам, то наткнулся на зарубежный сайт, там были разные бимы, несколько видов шагающего, с двумя и более моторами. Вот я решил-буду собирать этого ! Заказал детальки в чип и дипе(вроде). Когда детальки пришли, и я начал паять схему, оказалось не хватает третьей микросхемы. А у меня в кружке таких не найдешь. Пришлось забросить. И вот недавно я ве-таки собрал его, причем собрал и он заработал с первого раза !- у меня с первого раза не разу не работало нифига нормально, вечно отлаживать приходилось, а тут нормально все.
Добавлено (10.11.2011, 22:33) --------------------------------------------- Так, сделал новые фотки:смотреим тут, в альбоме
Снял видео:
Что-то не так: - мне не нравится тот факт, что он как-то необычно работает. Например, когда включаешь питание, он сразу не работает, а черер пару секунд только начинает проявлять активные действия. Или вот там у меня стоят подстроченики. Я их и так и так крутил, но визуально ничего не заметил в работе моторов. Средний мотор не вращается вообще. Т.е. когда на него мотрю повнимательнее-видно как шестеренка как в часах-туда сюда, пытаааается дрыгать, но видимо сил не хватает. Жаль тестером не дошло замерить (УпС). Кто что скажет ? =)
Чтобы разобраться в том, что не работает нужно взглянуть на исходную схему, по которой велась сборка и немного её проанализировать. Как видно на электрической схеме моторы подключены напрямую через микросхему 74HC245. Эта микросхема двунаправленный шинный формирователь с 3-мя состояниями на выходе. Управляя потенциалом на ноге 1 меняем направление передачи сигнала. Управляя потенциалом на ноге 19 разрешаем или запрещаем прохождение сигнала. Для разрешения прохождения используется как ни странно лог.0.
В схеме ходока 74HC245 используется в качестве драйвера для 3х моторов. Микросхема 74HC245 разделяет моторы и многофазный генератор и не даёт влиять трём моторам на генерацию импульсов на выходе 6 инверторов. Микросхема 74HC245 не рассчитана на большой ток, её нагрузочные способности смехотворны, всего 20мА ! и это заметьте в "холостом" режиме, когда нет торможения вала мотора из-за трения или усилий при соприкосновении с поверхностью! Малейшее усилие на вал мотора и микросхема не выдержит. Теперь об усилиях. Роботы типа walker (ходоки) для передвижения по поверхности должны развивать на валу мотора (и тем более на конечностях) большие усилия, до нескольких кг! На видео можно рассмотреть, что робот не может сдвинуться с места, так как не хватает усилия из-за малых токов! Нужно ставить после (или вместо) 74HC245 усилитель тока на транзисторах. Если подключать по схеме эмиттерного повторителя, то потребуется 12 транзисторов. -------------------------------------------------------------------------------------------------------------------------------------------- ---------------------------------- Далее о вялом старте. За блокировку "ног" отвечает резистор сопротивлением 2Мом и конденсатор 2,2мкф, а также инвертор U2a. При зарядке конденсатора на выходе инвертора U2a положительный потенциал закрывает по входу 19 мс 74HC245. Так вот, чем больше ёмкость конденсатора и сопротивление резистора, тем дольше будет блокироваться 74HC245. Чтобы уменьшить это время до приемлемого, нужно уменьшить сопротивление резистора до 1Мом, а ёмкость конденсатора до 0,1мкф. Одновременно этот резистор , конденсатор и инвертор формируют запускающий импульс на многофазный генератор из 6 инверторов.
Вообще то хочется поставить твёрдую двойку тем кто рисовал исходную схему, так как нет ни буквенных обозначений ни общепринятой логики обозначений! Кстати взгляните на первоначальное фото робота собранного за рубежом. В нём установлены редкие моторы (вряд ли такие можно купить). Их особенность в очень малом потреблении тока и гигантском усилии развиваемым валом. В общем заграничный робот первоначально был собран на редких моторах и схеме работающей на грани фола. Схема "сырая" повторять не советую!
[offtop] {{TNT}}, ни кто даже не сомневается [/offtop]
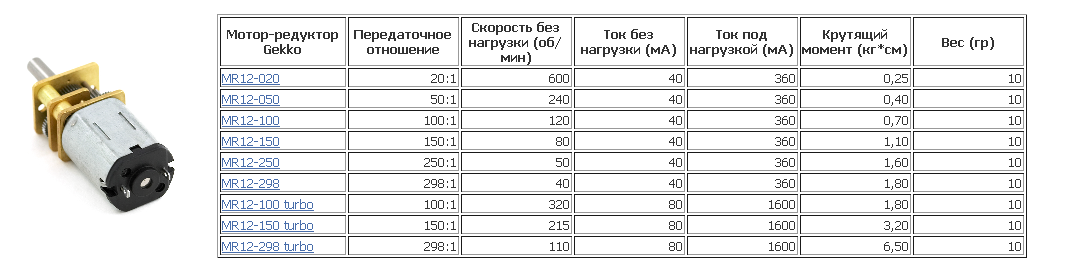
S-T-A-L-K-E-R(А), а какие моторы использовал? Меня просто килограммы*сантиметры интересуют. А сам тут табличку эту оставлю...
Объясню русским языком: килограммы*сантиметры это рычаг длинной в сантиметр, один конец кот звкреплён на оси мотора а на другом конце рычага вес. Например: Крутящий момент 1.1кг*см означает что мотор сможет поднять рычаг (длинной в 1см) на котором закреплён груз массой 1.1кг.
Общайтесь с друзьями в нашем Online-чате по робототехнике
Мы рады, что в России открывается все больше кружков по робототехнике и мы стараемся прикладывать к этому свои усилия начиная с 2008 года :) Мы будем очень рады видеть в чате живое общение, обмен опытом между учащимися в робототехнике и просто увлеченными в этом направлении людей. Мы всегда онлайн, приходите, спрашивайте, помогайте другим - давайте сделаем Мир чуточку лучше!
Чтобы не потерять чат и быть всегда с нами на связи - откройте окно чата в новом окне браузера и добавьте его в заколадки. Открыть в новом окне











 [/offtop]
[/offtop]