_________________________________________________________________________________________________________________________________________
И так, продолжим... Последнее что мы сумели сделать это заготовки пальцев:
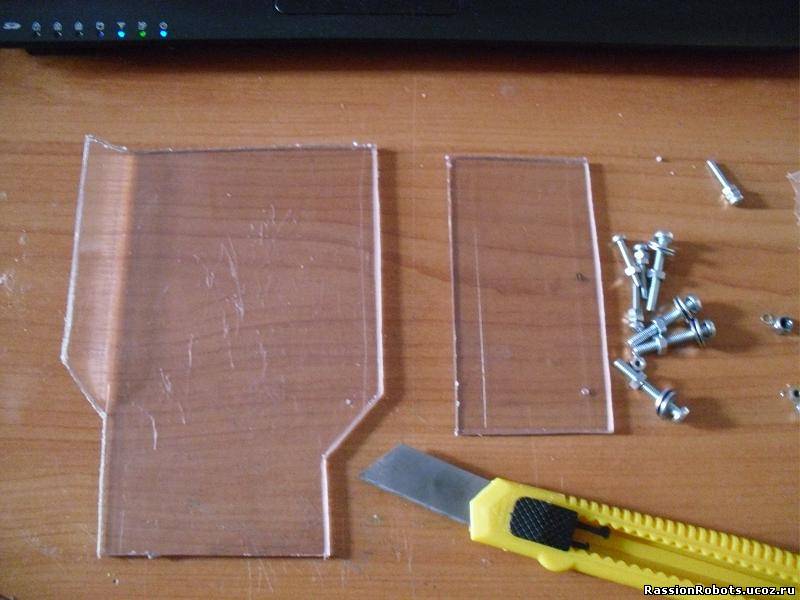
Теперь их нужно "отреставрировать" и привести в божеский вид. Эти пальцы пока весят "в воздухе", так как они не к чему не прикреплены. Надо исправлять это положение. Основу, к которой будут крепиться наши пальцы будет составлять орг-стекло:
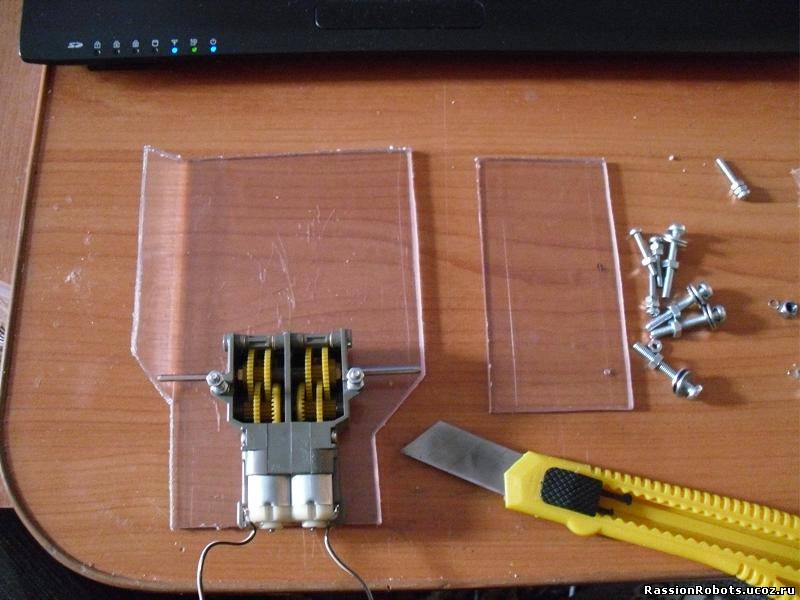
На нем будет также установлен сервопривод, отвечающий за сгиб/разгиб пальцев:
Одна часть сервы будет отвечать за один(большой) палец, другая за остальные четыре. Раз у нас проект в начале разработки, то и мудрить с механикой сильной нужды нет. Главное тут- показать принцип работы, и доказать, что можно управлять не только этим протезом, но и более сложным агрегатом.
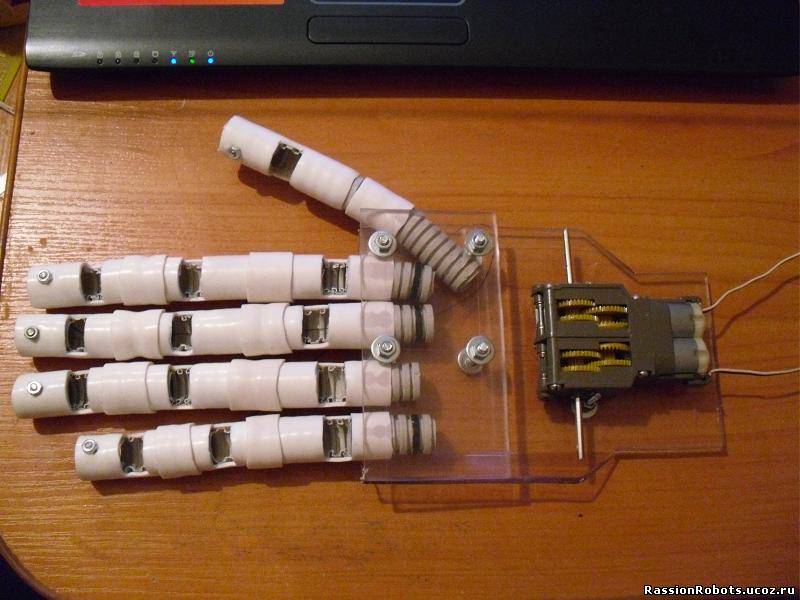
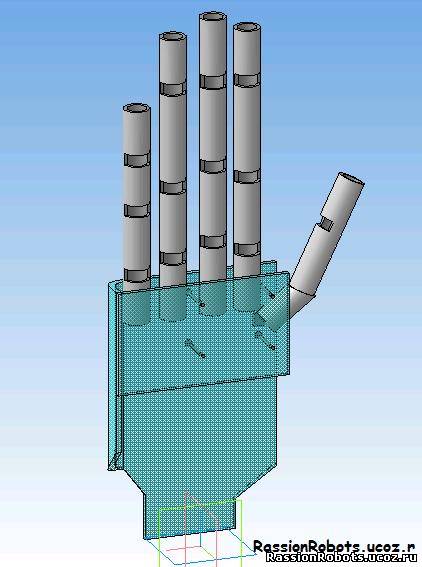
Начинаем собирать и скреплять пальцы:
Ну и как будет выглядеть с сервоприводом:
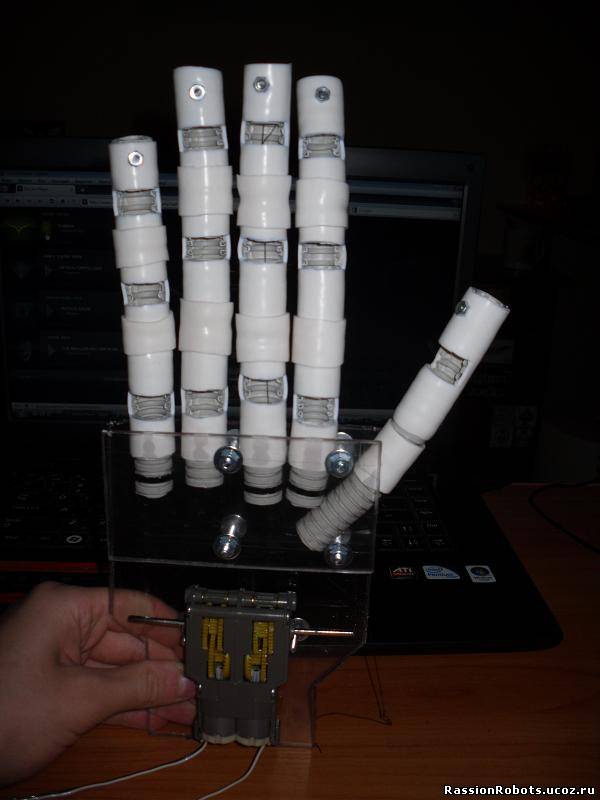
Что бы наши пальцы сгибались нам нужны тросики, эти тросики нужно прикрепить к канцам пальцев. Для этого мы вставим по болту в каждый палец, к которому будет прикреплен тросик.
Продолжение следует...
Добавлено (27.03.2010, 00:02)
---------------------------------------------
Небольшой видео-ролик, можно увидить как будут сгибаться пальцы:



















 Эти "плохие люди", очень мягко выражаясь, меня начинают бесить ! До сих пор товар заказанный не скомплектован. Вот только приеду в СПб...
Эти "плохие люди", очень мягко выражаясь, меня начинают бесить ! До сих пор товар заказанный не скомплектован. Вот только приеду в СПб... 