Недавно возникла идея, что если использовать вместо тактильных датчиков - выключателей компараторы, при помощи которых измерять напряжение на резисторе, включенном последовательно с двигателем и таким образом определять уперся ли робот во что-то или нет.
Если вал электродвигателя застопорить, то двигатель начинает потреблять больше тока, чем тогда, когда он был не застопорен, таким образом, на резисторе, включенном последовательно двигателю появится падение напряжения равное U = I*R, где I - ток, протекающий через двигатель, R - сопротвление того самого резистора. Схема:
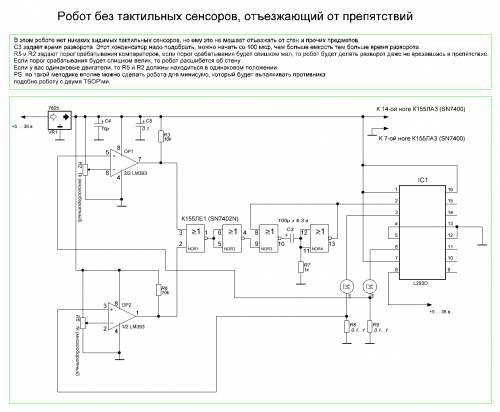
Когда робот упирается во что-нибудь, то он разворачивается, выключая один двигатель и продолжает движение.
Конечно, такой способ разворота не совершенный, но цель этой темы -
По такой схеме вполне можно сделать робота, который будет просто бегать внутри коробки, аналогично тому или проходить лабиринт по правилу правой /левой руки.
Немного изменив схему вполне можно использовать такого робота для минисумо.
Настроить робота можно так, что он будет ощущать легкое прикосновение к колесу (проверено).
Цель этой темы - дать "пищу для размышлений", быть может появится новые простые BEAM сумоисты, лабиринтчики, лишенные тактильных и оптических сенсоров, с последними у новичков нередко возникают проблемы.[/spoiler]











