В этой теме Вы можете задать вопрос о материале Роботизированная охранная система ОСА v3.1.
Добавлено (02.10.2011, 20:56)
---------------------------------------------
Долгое время у меня то не хватало времени, то просто было лениво, то еще что-то, чтобы починить таки этот чертовски хороший ДД, старая версия которого так и не запустилась как нужно было. Да, были ошибки в схеме, которые обнаружились уже только в процессе проверки на практики. Ну ничего страшного, тот ДД я переделал и пустил на управление пылесоса )
На данный момент был собран новый, более продуманный драйвер двигателей, с управлением скорости по широтно-импульсной модуляции, и, или, простыми логическими уровнями "1" и "0". На фото ниже сам ДД:
фото1 фото2
По компьютерному зрению масштабных работ пока не велось, были моменты когда я разбирался с библиотеками AVM(ассоциативной видео памяти), программа на ней работает хорошо, лучше мб даже чем на Emgu, но программу эту с библиотеками писал не я, и как-то не удобно ее на себя оформлять ). Так что лучше пока на таком этапе рассматривать Emgu, хоть она вроде как и мене функциональна, но зато ее можно понять, а в AVM черт ногу ломит. Вот когда более менее буду разбираться в КЗ, тогда может и разберусь. тем более мне тут товарищ nightmare подсказал еще несколько интересных библиотек, с которыми потом надо будет поработать и, возможно, включить в проект ОСА.
По удаленному управлению, помимо управления системой с ПК1, теперь есть возможность управлять роботом с ПК2 через ПК1 удаленно по ети интернет. Для этих целей используется сервер Denwer, TopServer тоже использовался, но пока есть некоторые проблемы и стем и с первым. У Denwera происходит падение сервака при запуске управления через браузер. Проблема связана с какой-то библиотекой, которая возможно не правильно работает в 7ке. С TopServer дела обстоят куда лучше, никаких проблем не возникает в использовании. Все работает, ничего не вылетает. Для отображения картинки в браузере используется программа перехватчик фрэймов с камеры со скоростью 20 кадров\сек. Подсказали что есть и другой способ-вести запись в файл и воспроизводить на браузере(пока не пробовал). По управлению из браузера такая ситуация на данный момент: при управлении через браузер на ПК2, в ПК1 начинаются запускаться соответсвующие командам программы, которые записывают в порт данные, команды для робота. Это не особо быстрый способ, но зато действенный. Правда над этой системой предстоит еще поработать.
На днях, у меня в городе Cанкт-Петербурге, проводился IV инновационный форум, в направлении "Мехатроника и робототехника". На нем мы представляли эту систему. Ну, конечно как всегда начались находится косяки, недочеты. Самый коварный косяк-разрядка аккумуляторов. Когда я тестировал работу системы-она работала как часы, и я не волновался на счет ее роботоспособности. Но вот когда притащил на выставку, а аккумуляторы уже были подсажены. Пришлось заряжать. Взял свою зарядку. Подключил в попыхах неправильно. Спалил. Одолжил у знакомого зарядку. Подключил. Сгорела. Подключал правильно-зарядка перегрелась и корпус вообще потек. Не стал ее повторно пытаться включить. Пробовали зщаряжать цифровыми,-вроде как зарядились, но так как всем надо было зарядить, все друг у друга отбирали и заряжали по 5 минут )) Вообщем так и не зарядил до 100%. Заряд был где-то на уровне 60-70% что сказывалось на работе ДД. Он работал из-за такого напряжения не корректно.
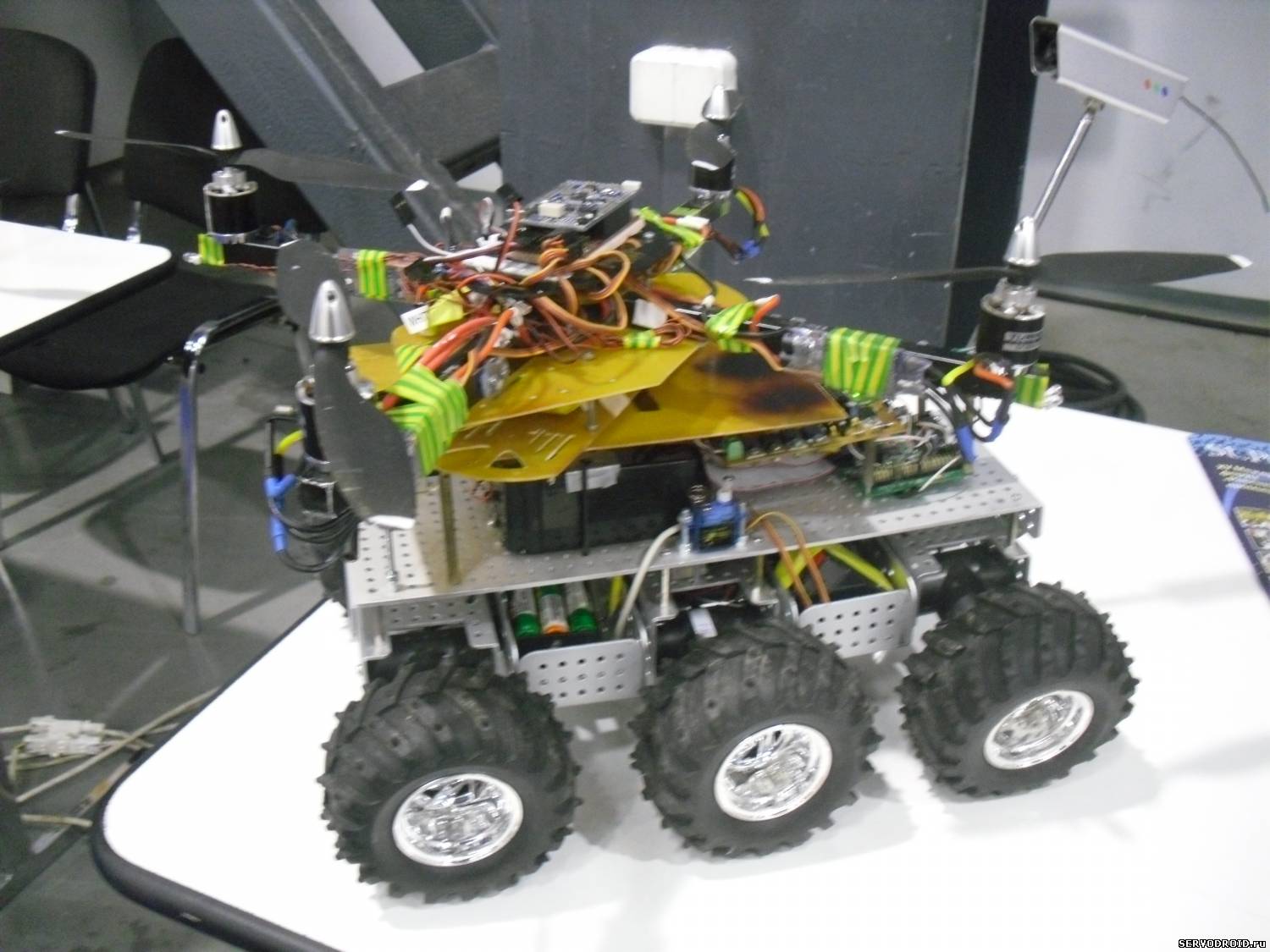
Ниже парочка фотографий и видео моей платформы. Кстати, там же на форуме познакомился с интересными ребятами, у них был коптер-классная вещь на самом деле ! Управлялась правда пока с пульта купленного, но ребята сказали что комплектацию подбирали сами. Вообщем мы с ними решили на время выставки объединится и сделать из моей платформы посадочную платформу для коптера, с которой он взлетал и садился. Пару раз правда моему боту доставалось, покацали провод от камеры, разок задели винтом блютус модуль. Потом я думал что все пропало, модуль не работал. На следующий день, я начал его проверять, оказалось что каким-то макаром у меня в программе изменился порт. Как это произошло понять не могу ? Ну слава богу вычислил и проблема решилась. И так, вот пару фото и видео: