Теперь в нашем онлайн-магазине доступна уникальная книга «BEAM-робототехника. От азов до создания практических устройств», идеально подходящая как для кружков робототехники, так и для самообучения дома. Вы можете приобрести её по привлекательной цене в 699 рублей. Дополнительная информация о книге доступна на нашем сайте. Также в ассортименте нашего онлайн-магазина представлены готовые наборы для сборки роботов, с помощью которых ваш ребенок сможет легко собрать своего первого робота, следуя нашим подробным инструкциям. Перейти в магазин
Данный проэкт ведется довольно давно и претерпел немало изменений, для тех кого заинтересует, более подробно можно почитать тут:
http://robotsspace.ucoz.ru/forum/3-443-1
Сейчас же, робот принял наиболее законченный вид и все дальнейшие изменения будут (скорее всего) незначительными. Итак:
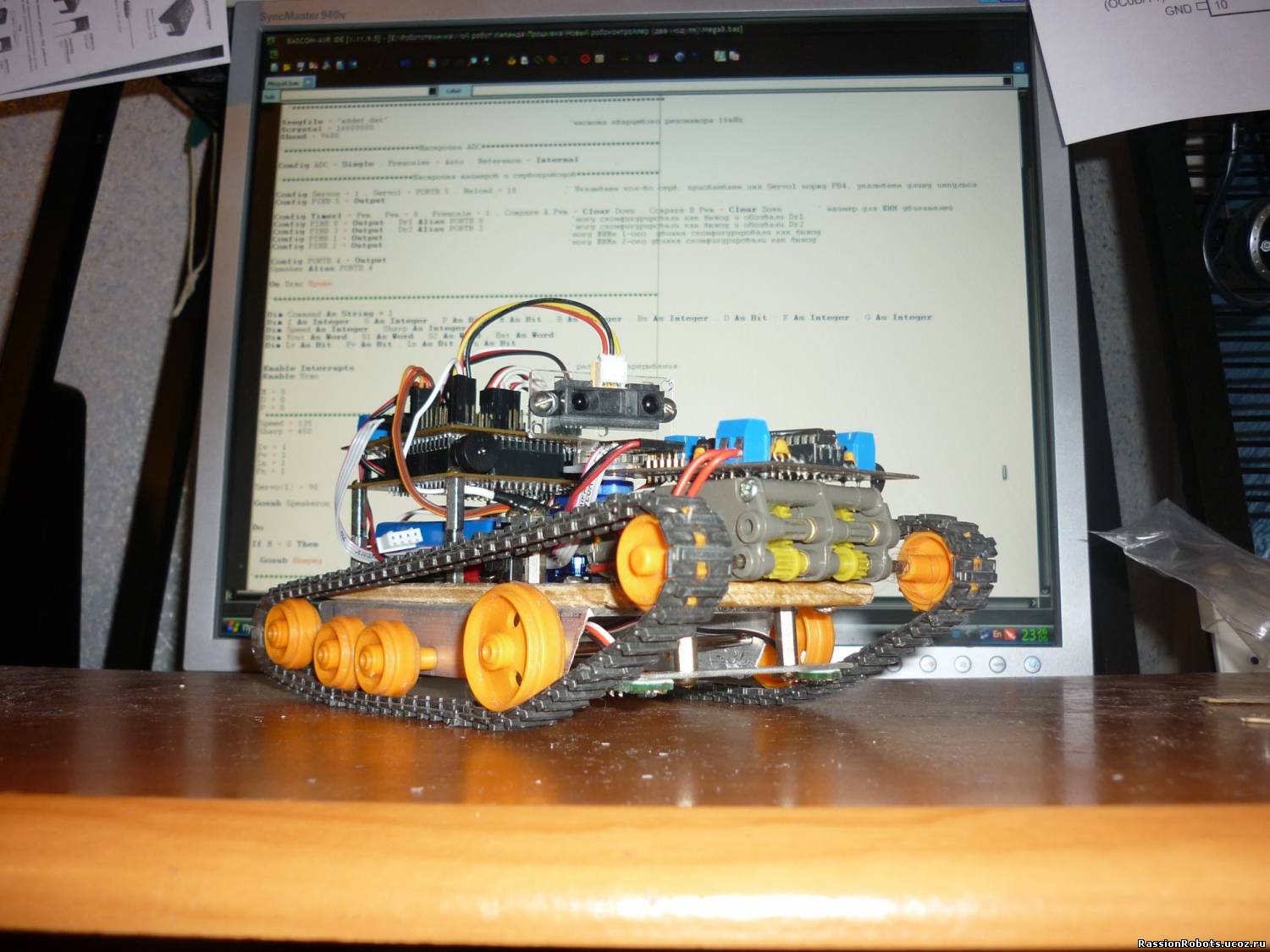
Цель - познание некоторых возможностей МК; освоение базовых элементов написания кода; научится работать с UART, протоколом RC5; наглядно изучить принцип работы дальномера, а также других датчиков; научится работать с LCD дисплеем. Основа робота.
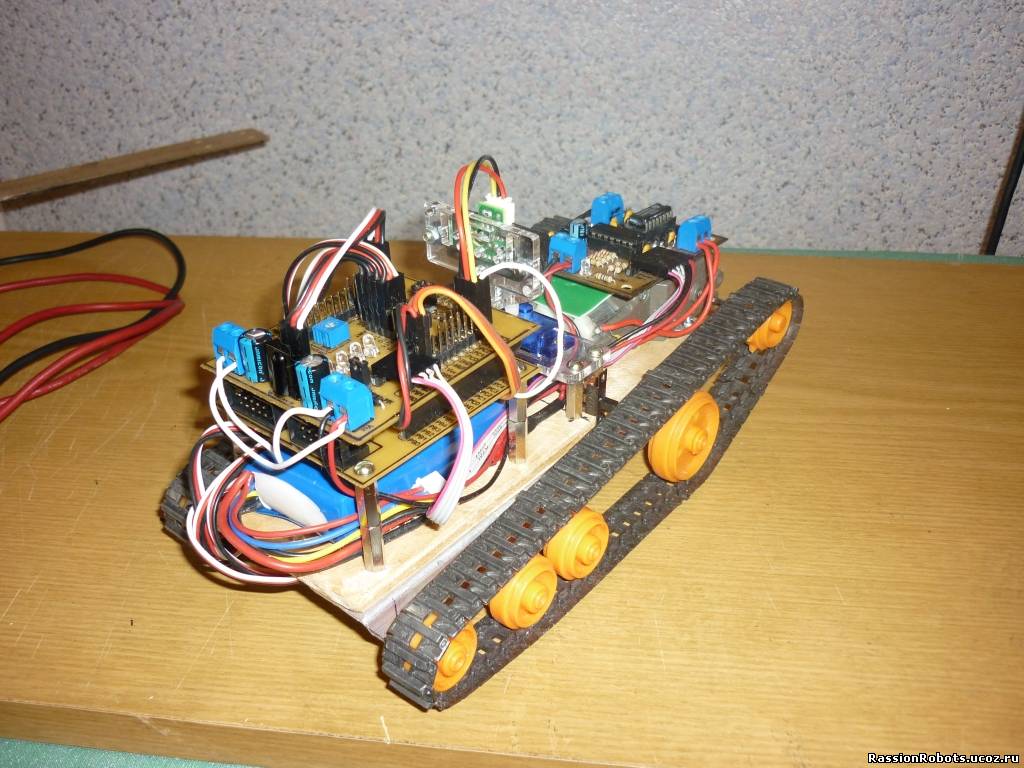
Механика: Гусеницы, редуктор - Тамия Сервоприводы - HXT так же использованы подручные материалы - фанера и аллюминиевые уголки
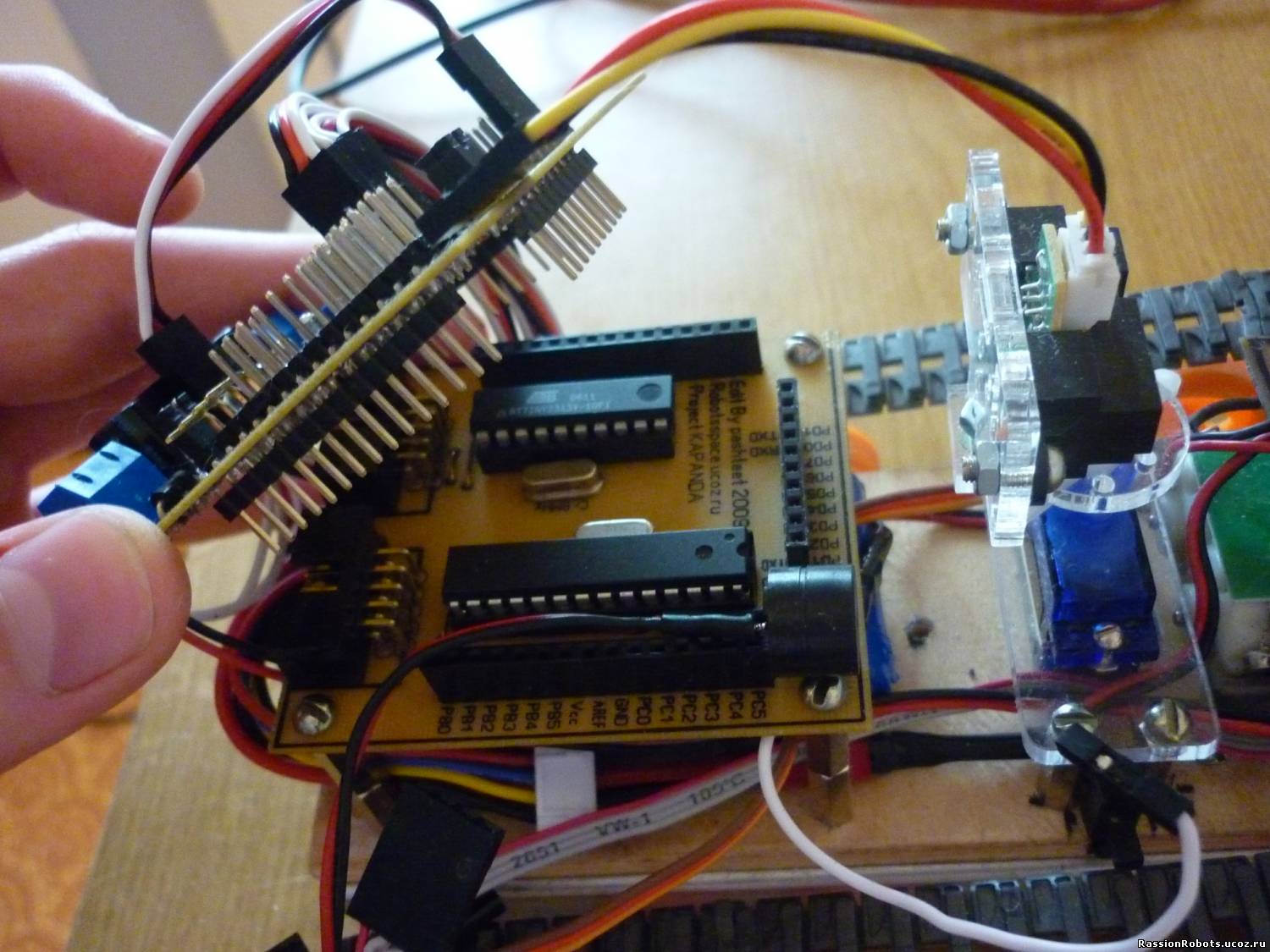
Электроника: Дальномер - Шарп Датчики цвета поверхности - ОпенРоботикс LCD дисплей 16*2 (в основном для отладки) Драйвер двигателей на основе L293B Робоконтроллер состоящий из двух МК - ATmega8 и ATtiny2313
Теперь о главном Видео демонстрации некоторых возможностей:
Описание возможностей: - Пищит разные мелодии, в том числе при включении и при разрядке батареи, а так же при обнаружении препядствия (на видео пищалка еще не установлена) - Катаемся по квартире не натыкаясь на стены и другие препядствия в доме (реализован алгоритм, двойной проверки дальномера, дабы исключить ложные срабатывания) - Связь между контроллерами осуществляется по UART - По команде с пульта переходим в "ручной режим" и управляемся только с пульта - Скорость можно регулировать в любом режиме движения (кнопки громкости на пульте) - Теперь можно регулировать порог срабатывания дальномера с пульта (кнопки вверх и вниз, соответственно - ближе, дальше) - По команде с пульта активируются датчики на пузе (для того, что бы можно было ползать по столу и не падать с него), прошивка в этом месте дорабатывается, т.к. изминился центр тяжести (после установки аккумулятора) и старая программа работает немного не корректно
Хоть каталась, у меня пкрвый был такой ленвый робот, с двумя 9 вольтовыми движками от магнитофона, ему так влом было двгаться=) Сейчас наверно лежит в кружке, пылтся...
pashteet, какое будущее вижу у этого робота Поработай над обработкой изображенй, приделай камеру, установи распознаване предметов, "хозяина", да и вообще чтоб можно было смотреть на то, как видет этот робот
веб камера неинтересно без хорошей оптики можно забыть про распознавание
Добавлено (20.12.2009, 13:05) --------------------------------------------- Ну вот мы и поучасвовали в офлайн соревнованиях по кегельрингу, результат - что-то около 10сек на стандарном кегельринге Видео:
Общайтесь с друзьями в нашем Online-чате по робототехнике
Мы рады, что в России открывается все больше кружков по робототехнике и мы стараемся прикладывать к этому свои усилия начиная с 2008 года :) Мы будем очень рады видеть в чате живое общение, обмен опытом между учащимися в робототехнике и просто увлеченными в этом направлении людей. Мы всегда онлайн, приходите, спрашивайте, помогайте другим - давайте сделаем Мир чуточку лучше!
Чтобы не потерять чат и быть всегда с нами на связи - откройте окно чата в новом окне браузера и добавьте его в заколадки. Открыть в новом окне














 настольгия..
настольгия..