Модель снабжена фото и сенсорными датчиками, движется в сторону источника света (фонарь, настольная лампа), при соприкосновении с препятствиями пытается их обойти, а в темноте "засыпает". В нашем случае, соприкосновение с препятствием быть не должно, и он должен двигаться по линии. Это не беда, все можно решить изменением "контактных датчиков" на опто-пары, смотрящие вперед, а фото-сенсоры повернуть вниз, к линии, плюс добавить к ним подсветку, чтоб робот видел линию. Подсветка может быть на видимом излучении- светодиодах, так и не видимом- инфракрасных светодиодах. Выбирать вам.
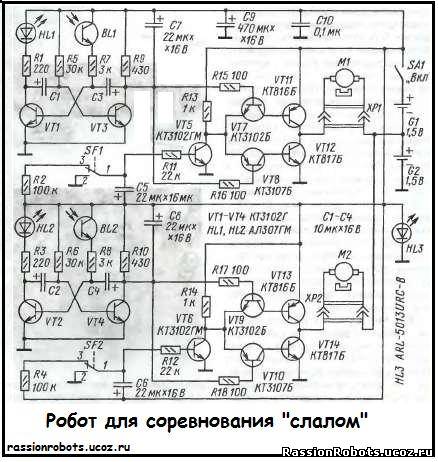
Принципиальная схема робота для соревнования "слалом" показана на рисунке выше. В ней применены два электродвигателя М1 и М2, для управления которыми используются одинаковые узлы. Узел управления первым электродвигателем М1 состоит из генератора импульсов на транзисторах VT1, VT3 и электронных ключей на транзисторах VT5, VT7, VT8, VT11, VT12. В частотозадающую цепь генератора установлен фототранзистор BL1. При изменении освещенности будет меняться сопротивление фототранзистора, а значит, частота и скважность импульсов генератора. С его выхода импульсы напряжения через токоограничивающие резисторы R15, R16 поступают на базы транзисторов VT7 и VT8 соответственно. В зависимости от состояния транзистора VT5 эти импульсы будут открывать один из транзисторов VT7 или VT8.
В исходном состоянии транзистор VT5 открыт, поэтому импульсы генератора открывают транзистор VT7. Транзистор VT11 также открывается, и импульсы напряжения гальванического элемента G1 поступают на электродвигатель М1 — он начинает вращаться.
При нажатии на кнопку SF1( мы будем использовать датчик линии/препятствия) транзистор VT5 закроется, и импульсами генератора будет открываться транзистор VT8 и соответственно VT12. Импульсы напряжения гальванического элемента G2 поступят на электродвигатель М1, и направление его вращения изменится на противоположное. Управление электродвигателем М2 осуществляется аналогичным образом. Светодиоды HL1, HL2 сигнализируют о нормальном режиме работы генераторов, а "мигающий" светодиод HL3 индицирует состояние элементов питания G1, G2.
Когда они разрядятся, он перестанет мигать.
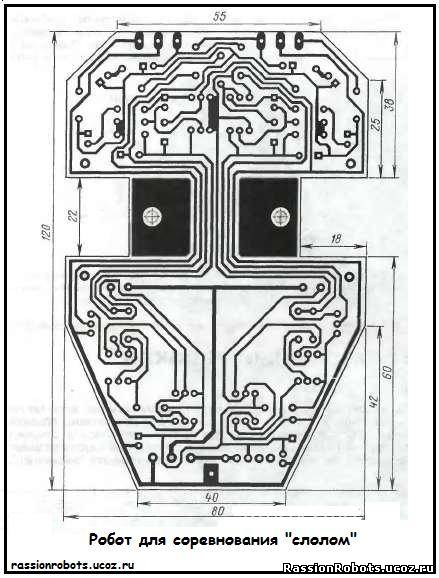
Печатная плата:
Все элементы устанавливают на печатной плате из односторонне фольгированного стеклотекстолита толщиной 1,5...2 мм, изображенной на выше. Использованы резисторы С2-23, оксидные конденсаторы — импортные, конденсатор СЮ — К10-17, КМ-6. Транзисторы КТ3102ГМ заменимы на КТ3102БМ, КТ816Б — на КТ814Б, КТ817Б — на КТ815Б. Фототранзисторы BL1, BL2 — от компьютерной "мыши", их можно заменить на ФТ-2к, но уменьшится угол обзора. Выключатель SA1 — движковый, например, SS12D10 или другой, подходящий по размерам. Кнопки SF1, SF2 с самовозвратом — DM1-01C с изогнутыми выводами, их вставляют в отверстия платы и припаивают. Можно применить кнопки DM1-01P с прямыми выводами(но в нашем случае будут оптопары, не забывайте(!)), в этом случае их припаивают непосредственно к контактным площадкам платы вплотную к ее краю.
Электродвигатели М1, М2 — от CD-ROM проигрывателя PPN13LB11C. К печатной плате их крепят с помощью больших металлических скрепок, которые выпрямляют, залуживают в середине и по краям, припаивают к корпусу каждого электродвигателя, загибают концы, вставляют в отверстия А, В и С, D и также припаивают. Электродвигатели должны быть расположены под углом около 45° к поверхности платы. На их валы необходимо надеть ПХВ или резиновые трубки подходящего диаметра или ролики. Если этого не сделать, робот будет передвигаться слишком медленно.
Валы электродвигателей обеспечивают две точки опоры, а третьей является задняя стойка. Изготовить ее можно из скрепки, которую вставляют в отверстие Е, подбирают высоту, угол наклона и припаивают к квадратной контактной площадке. Датчики усы также изготавливают из больших скрепок. На кнопках DM1-01P есть отверстия, в которые продевают один конец скрепки так, чтобы обеспечить ей свободный ход. Изменяя ее форму, добиваются надежного переключения кнопок при контакте усов с препятствием.
Расположение деталей на плате:
G1, G2 — гальванические элементы типоразмера АА, для их установки применена двухсекционная кассета, которую крепят к плате клеем. Контакты кассеты соединяют с печатной платой изолированными проводами.