|
Делаем энкодеры
|
|
Начальная группа
1798 сообщений
Мужчина
|
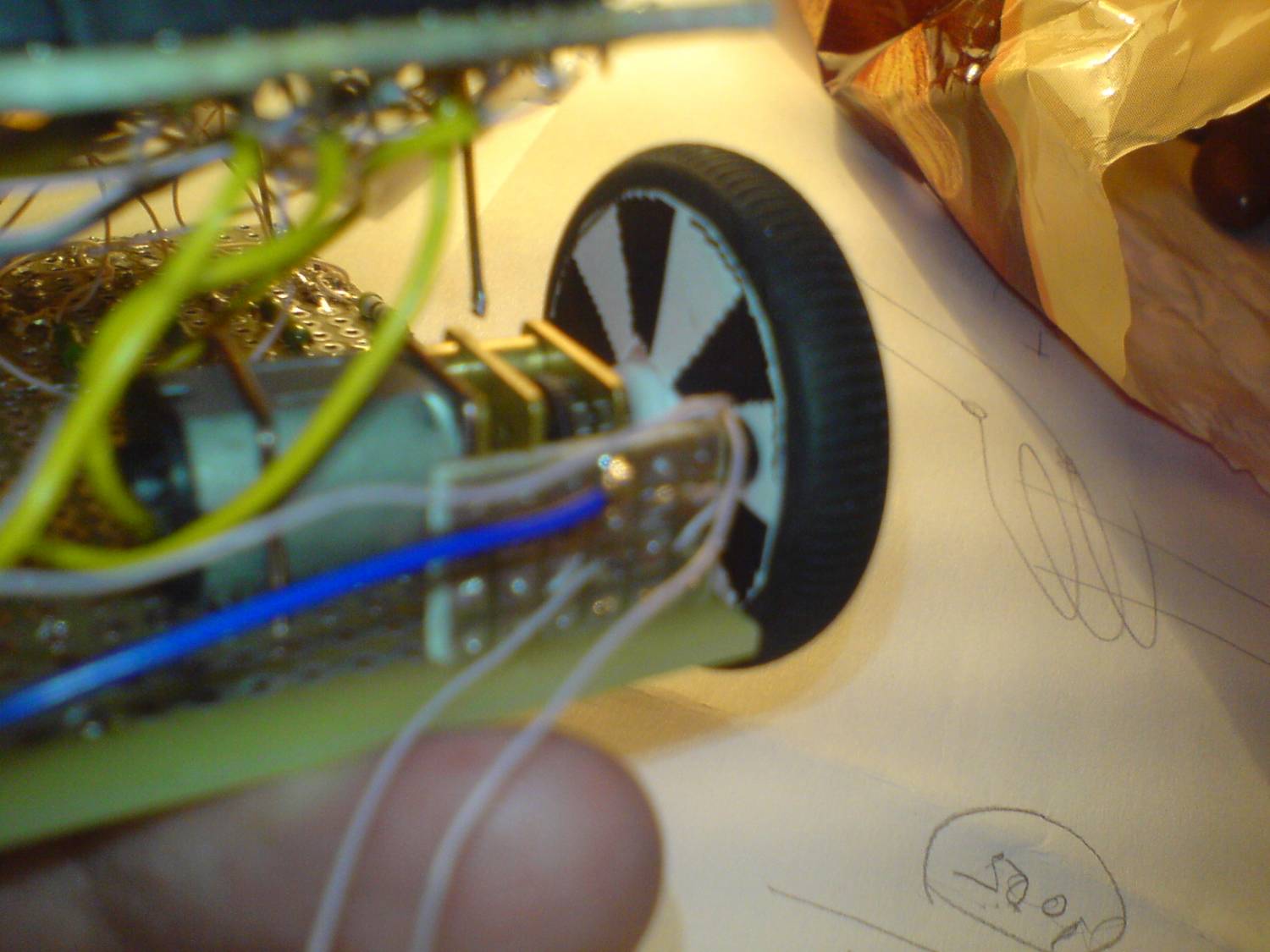
Недавно решил сделать энкодеры для робота, чтобы считать сколько проехал. Для этого я нарисовал в Front designer вот такую картинку:
Распечатал, приклеил на колеса:
На кусочках текстолита стоят открытые оптопары.
И того 6 белых секторов, а т.к. прерывание будет происходить по перепаду уровня, то получаем 12 импульсов за оборот.
Радиус колеса 13 мм, тогда длина окружности 2*3.14*13 = 81.64 мм
Получаем, что 1 импульс это 6.8 мм пройденного пути.
Сейчас думаю как избежать засветки оптопар, сначала сделал при помощи компаратора, но не помогло 
Теперь возникла замечательная мысль, модулировать ИК светодиод от микроконтроллера, т.е. настроить один из таймеров на 13.985 кГц и на эту же частоту настроить LM567  Но это чуть позже.... Но это чуть позже....
PS. Вскоре ворклог превратится в полноценную статью про изготовление энкодеров, подключение к МК, написание подпроограмм и тп.
9471820.png
(1.2 Kb)
·
9346765.jpg
(121.1 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Ну да, модулированный сигнал самое то Не боимся засветки,
Зы моторы дорогущие взял
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Ага, очень уж хотелось сделать маленького робота, получилось 8 х 6.5 см.
Они кстати всего 20 ма жрут
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
На видео смогешь заснять работу ?
|
|
|
|
|
|
Участник
36 сообщений
Мужчина
|
Что будет уметь этот маленький робот?
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Он сможет считать сколько пройдет в см-м. Например для кегельринга самое то! Ставим на середину, он банку увидел выьолкнул и на предполагаемое место старта вернулся ) (как я делал на NXT)Добавлено (31.05.2010, 12:56)
---------------------------------------------
Составлять карту 
|
|
|
|
|
|
Участник
36 сообщений
Мужчина
|
Я имел ввиду глобально, не в смысле энкодеров, а для чего робот будет предназначен кегельринг, лайн трейсер...
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Quote На видео смогешь заснять работу ?
Смогу.
Робот будет предназначен для лайнтрейсинга, кегельринга, сумо, прохождение лабиринта по линии (для начала) потом для настоящего (см. Micromouse Competition), слалом, теннис в перспективе, когда дальномер куплю.
PS дальномер покупаю сегодня, жду пока деньги с киви придут )
|
|
|
|
|
|
БЛОГГЕР
453 сообщений
Мужчина
|
Quote (nightmare) nightmare
а ты покупал мотор-редукторы?
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Да, конечно.
|
|
|
|
|
|
Участник
36 сообщений
Мужчина
|
Многоцелевой получается робот, а для сумо не хрупковато будет на макетке все крепить?
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Нет, конструкция прочная.
На фотке второй этаж не закреплен (припаивал ДД)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
хоть сфоткал бы и целеком 
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Эх, не даете вы неравенство решить, показательное

Это старая фотка, новую потом выложу, когда соберу робота.
1089796.jpg
(150.3 Kb)
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Ну вот, деньги пришли на счет, пойду отовариваться
|
|
|
|
|
|