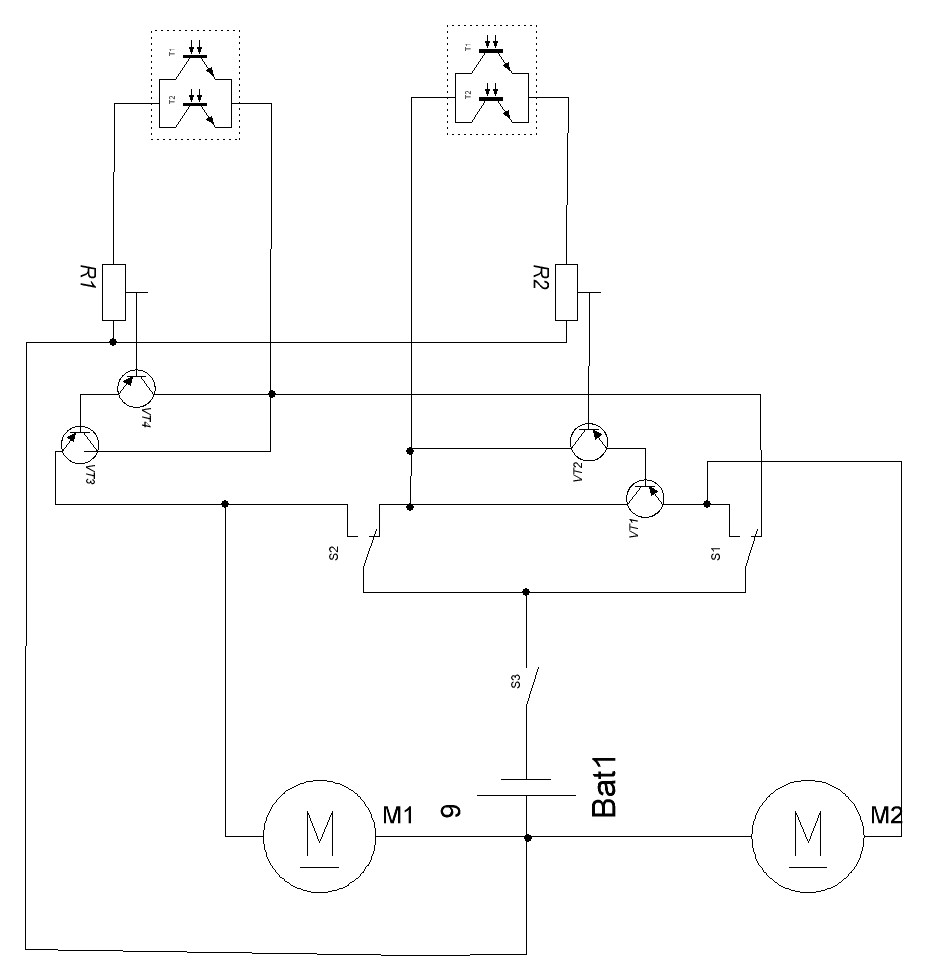
С такими талантами пора тебе Elektro свой блог открывать, там и выложишь конструкцию! Несколько замечаний по конструкции, тебе не повредят. Ты использовал фототранзисторы от мыши сдвоенные судя по эл.схеме и фотографиям. На эл.схеме правый (по расположению) фототранзистор подключен неверно, эмиттеры должны быть подключены к минусу источника питания, а коллекторы к подстроечному резистору R2. Вполне возможно, что собрал схему ты без ошибок, но всё же не будем вводить в заблуждение тех кто будет это просматривать. Далее.. использовать батарейку типоразмера 6F22 с напряжением 9 вольт рекомендуется в схемах с импульсным током потребления. Это совет на будущее. Потому что номинальный ток нагрузки для такой батарейки 20мА иначе ты её "посадишь" в течении часа. Так как два мотора будут потреблять заведомо больший ток.. раз в 10 ! В твоей схеме питание поступает на моторы постоянно, нагрузка на батарейку слишком значительная. Лучший вариант -это установить футляр для трёх или четырёх батареек по 1,5 в, что в сумме составит 4,5 В или 6В. Это обеспечит значительный ток и робот будет ездить долго. Если увеличить сопротивления подстроечных резисторов R1 и R2 до 150кОм, то чувствительность сильно возрастёт и робот будет "видеть" отражённый от пола свет фонарика.
Если параллельно батарейке (после выключателя питания) поставить конденсатор ёмкостью 1500мкФ или 2200мкФ, то при переключениях датчиков S1,S2 или попадании луча света на фототранзисторы возникнет, так называемый "пусковой" ток. Конденсатор большой ёмкости будет разряжаться на моторы и создаст первичный импульс тока. Робот станет более активно реагировать на свет фонарика и преодолевать препятствия.
















 я все учту на будущее) на счет блога я уже думал у меня много идей "на бумаге" но вот воплотить их пока не получается((((( начинаю пока с малого))
я все учту на будущее) на счет блога я уже думал у меня много идей "на бумаге" но вот воплотить их пока не получается((((( начинаю пока с малого))