Начальная группа
2 сообщений
Мужчина
|
идет добавление текста
Добрый день.
Здесь я представлю на суд робото-строителей несколько идей по сумо-логике.
сам я еще не пробовал создавать робота, но уже загорелся, пошли в ход наброски, заметки, закладки и тп.
итак начнем.
насмотрелся в инете видео - пришел к выводу, наши сумоисты имеют несколько недостатков
1. не видит соперника
2. не могут уйти от атаки
отталкиваясь от этого я стал понимать каким поведением должен обладать сумоист :
*поиск - пользуется сенсорами для поиска противника и поворачивается в его сторону
*атака - едет в сторону противника и толкает его пока не достигнет белой линии
*защита - противник спереди/сбоку/сзади и у нас белая линия - выполняем поворот либо едем от нее изо-всех сил
*положение в ринге - избегать белой линии
Добавлено (11.11.2011, 13:24)
---------------------------------------------
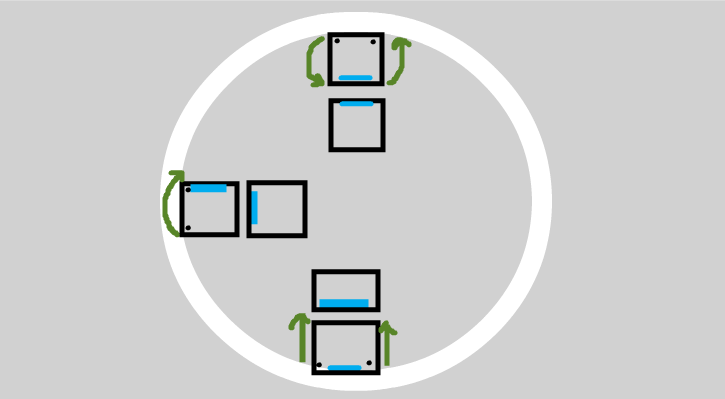
*поиск

первое что необходимо нашему борцу - развернуться к противнику лицом.
изображенное на картинке каляки-маляки это наш борец.
черные точки по углам - датчики которые отслеживают белую линию
красные полосы которые смотрят в стороны из 8ми граней - фото/инфракрасные датчики либо дальномеры - что душе угодно... хоть лазеры
если наш робот видит противника любым красным сенсором - он должен сделать поворот в вправо/влево/наместе до тех пор пока противник не будет виден в синим сенсором.
организовать такое управление можно на аппаратном уровне
Добавлено (11.11.2011, 13:51)
---------------------------------------------
*атака
тут как бы все ясно и просто - в синем сенсоре видим нашего противника - едет вперед до тех пор пока нет белой линии.
Добавлено (11.11.2011, 13:57)
---------------------------------------------
*защита
это на мой взгляд самое сложное в реализации, т.к. необходимо какимто образом переключать
робота в состояние когда он не пытаеться повернуться лицом.
на мой взгляд, управляющий сигнал от сенсоров белой линии достаточно весомый аргумент чтобы робот начал защищаться.
у защиты робота тоже не все ситуации одинаково приоритетны.
1. нас выпихивают назад
2. нас выпихивают боком
3. нас выпихивают передом
с первым и последним вроде все понятно - если зад на белой линии - газ и полный вперед
но это не еффективно. сумоисты в таких случаях пытаются развернуть соперника.
нам бы не помешало - выполнить разворот на месте.
Возможно я не прав, но стоит попробовать.
второе - на пихают в бок наш сумо пытаеться развернуться и тут у нас появлась белая линия.
чтож, положение не выгодное, но и не безвыходное
добалю позже
|
|
|
|
|
|
Модераторы
211 сообщений
Мужчина
|
Спасибо за представленные соображения, постараюсь реализовать это в новом роботе "Сумо", который скоро появиться на сайте!
|
|
|
|
|
|
Начальная группа
2 сообщений
Мужчина
|
если есть что добавить, дополнить - прошу
|
|
|
|
|
|
Участник +
189 сообщений
Мужчина
|
|
|
|
|
|
|









