|
Мелкий, дешевый микроробот-конструктор для соревнований
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
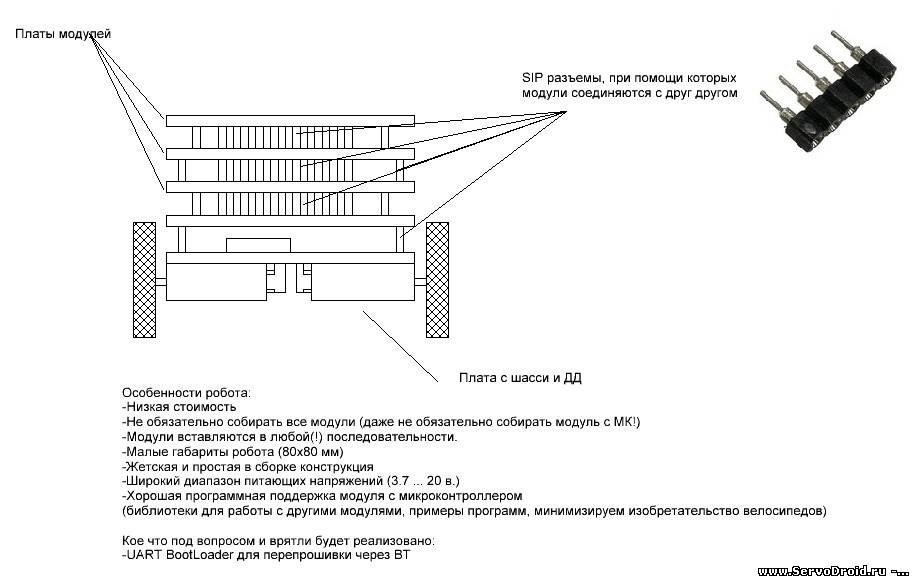
Давненько подумываю о мелком многофункциональном роботе, поэкспериментировал со своим мелким роботом, сделанным из двух макеток и понял, что модернизировать его не удобно. Немного подумав, решил, почему бы не сделать робота модульным и максимально упростить крепления между модулями.
Возникла следующая мысль - сделать крепления между модулями как в Arduino, только расположить разъемы не с двух сторон, а с четырех для большей компактности и прочности конструкции.
Таким образом можно разработать кучу модулей из которых, как будто из конструктора, можно собрать робота для какого-то вида (видов) соревнований, при этом совершенно не замарачиваясь с креплением этих модулей к шасси и тп.
Для удобного программирования робота будут написаны специальные библиотеки для работы с модулями, постараемся не спускаться на уровень работы с регистрами микроконтроллера, т.е. упростить процесс программирования, ведь довольно много проектов роботов останавливаются намертво на этапе программирования, т.е. не понятно как соединить этот готовый кусок кода с тем, что записать в регистр и тп.
Схемы и платы модулей - конечно же в свободном доступе. Иллюстрация этой модульной структуры "пирамидка"  : :  PS: аккумулятор крепится на самом нижнем этаже, ближе к "носу" чтобы центр тяжести по ниже был и робот не перевернулся. Кто что думает по этому поводу? Будет ли людям интересен такой робот?
5850532.jpg
(87.2 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
3.7 - 20 В оО Насчет дешевизны... врятли. СМД компоненты стоят не дешевле ДИПовских, это еще при том что у нас в городе есть этот магазаин и нам не надо переплачивать за доставку через ИМ по почте  Потом, эти маленькие мотор-редукторы самим можно сделать, но это лишит этот "конструктор" простоты... Следовательно только под заказ по почте... Тоже дорого. Так как не везде моторы и эл. компоненты вместе продаются...
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Никаких SMD, новичкам удобно будет их паять?
На плату чуть меньших размеров чем 80х80 умещается счетверённый компаратор в дипе, мега 16 в дипе, дд в дипе, несколько кнопок, стабилизатор напряжения в ТО-220 и кучка мелочёвки, в несколько этажей места будет ещё больше :-) . Вместо моторредукторов подумываю поставить микросервы, ты их юзал, как считаешь, потянут?
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Насчёт питания чё удивляешься?
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Насчет тех серв, что я на ОСЕ юзал, их в топку ! Лучше заказать либо сервы на металлических шестернях, либо такие как ты на микромаус юзал. Металлические хоть программно не сломаешь а пластмассовые, увы, собственный опыт- да, запросто...
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
-Модули вставляются в любой последовательности - про это можно забыть, проблемы с покупкой разъемов в россии.
SMD всё же придется применить, ибо удобно, но SMD'шки крупные - SOIC. Как продвигается проект:
1. Сделан первый вариант платы на которой крепятся двигатели и остальные модули.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Я же говорю, их заказывать придется... И смд тоже. В радиомагазинах их не найдешь, только в специализированных, типа "Чип и Дип" и тп. А у большинства в городах только радиомагазины, например в Мурманске. 
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
У большинства вообще нету в городах подобных магазинов 
Можно и без SMD сделать, чуть по хуже будет и по дороже.
|
|
|
|
|
|
Участник
36 сообщений
Мужчина
|
Тема определенно очень интересная! Для меня по крайней мере! Всегда хотелось не большого робота! Я так понимаю идет речь о роботе, созданном для стандартных соревнований (лайнтрейсинг, слалом, лабиринт и т.д.)? Набор датчиков для такого робота думаю тоже будет стандартен: датчики линии, препятствия, энкодеры, возможно еще что-то. Но еще больше меня привлекает идея создания группы мини-роботов (2 и более) и их взаимодействие друг с другом! Так вот хотелось бы узнать у кого, какие соображения на этот счет, что могут делать роботы сообща?
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Выталкивать противника в минисумо
Из датчиков еще дальномер на ~10 см (каковы реальные пределы измерений пока не могу сказать), RGB датчик цвета, датчик конца ринга.
|
|
|
|
|
|
Участник
36 сообщений
Мужчина
|
Quote (nightmare) RGB датчик цвета,
Чет не доеду, для чего будет предназначен датчик цвета?
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Да сам еще не придумал
Мне например, просто интересно такой датчик сделать.
Возможно где-то в соревнованиях понадобится, сейчас популярные виды соревнований усложняются, цвета уже надо различать, но цветов по прежнему только 2.
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Ворклог:
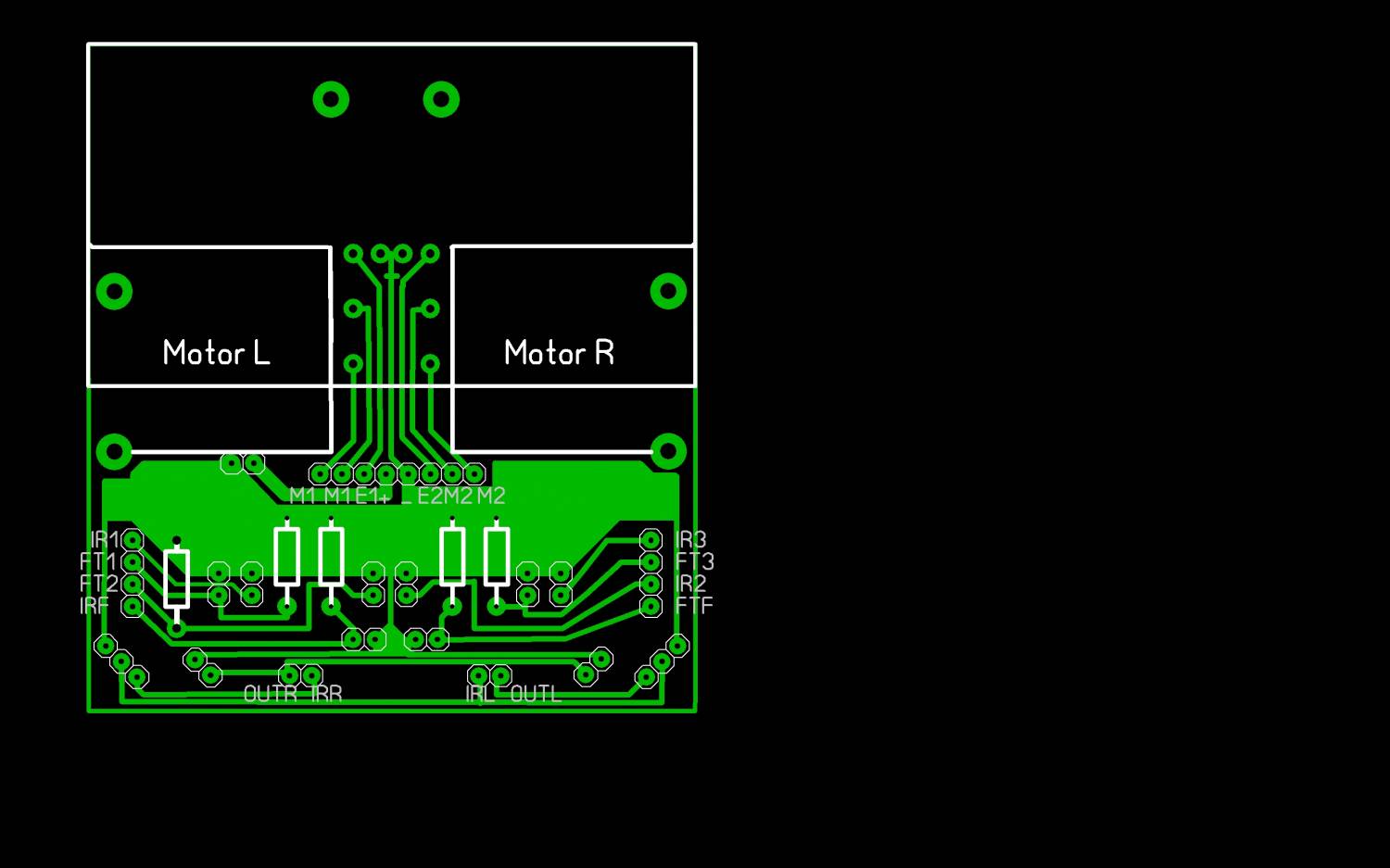
1. Разведена новая плата - шасси, на котором закреплены 3 датчика линии (аналоговые, поэтому и 3), 1 дальномер и 2 тсопа (и 2 TSAL'a).
Подруливающее колесо закреплено не спереди, а сзади, нагрузка в основном приходится на "зад". С такой конструкцией робот должен жестче проходить трассу по линии.
PS: удобно получилось - все земли сходятся в одной точке
5922702.jpg
(87.2 Kb)
|
|
|
|
|
|
Участник
36 сообщений
Мужчина
|
Что-то не совсем понятно, что где! Компоненты впаиваться будут не посредственно в эту плату или модули подключаться будут? Если в плату, то обвязки для TSOP'ов и TSAL'ов маловато!
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
На картинке 5 разъемов для модулей, обвязка будет на плате, которая вставится в эту плату. На этой плате вся обвязка не умещается, делать решил без SMD.
Мозг робота будет в двух версиях - BEAM и на мк.
|
|
|
|
|
|