00:26 Взаимодействие человека и машины на биологическом уровне | ||

Приветствую гостей и участников сайта ! После хорошо окончившихся соревнований, на которых мы заняли II место, захотелось сделать новый проект, под названием "Взаимодействие человека и машины на биологическом уровне". В этой теме будет рассказано и показано то, что человек может взаимодействовать с машиной, управляя ею с помощью биологических сигналов. Мы будем рассматривать некое устройство(схемы пока держатся в тайне, т.к. находятся в стадии разработки), которое будет снимать, усиливать, и передавать некий сигнал на исполнительное устройство... И так начнем ! Краткое вступление... Сегодня уже ни у кого нет сомнений в том, что жизнедеятельность человеческого организма тесно связана с электромагнитными процессами. Нервные клетки несут электрические заряды, по нервным волокнам непрерывно проходят электрические импульсы, то сильные, то слабые. Пример напряженной электромагнитной активности представляет собой работа мозга. В мозгу непрерывно совершаются электромагнитные процессы. Если на лоб и затылок наложить металлические пластины, соединенные через усилитель с регистрирующим прибором, то можно зафиксировать непрерывные электромагнитные колебания коры головного мозга. При этом их ритм, форма и интенсивность находятся в прямой зависимости от состояния человека. Наше устройство состоит из двух модулей-считывающего(их может быть много) и исполнительного. Считывающий модуль нужен для того чтобы снимать с возникающих в мышцах человека биоток. Дальше он будет усилен специальным операционным усилителем и конвертирован в сигнал. Этот сигнал будит считывать уже исполнительный модуль. Он предназначен для управления агрегатом, к которому он собран. Управлять можно чем угодно ! От игрушечной машинки на радиоуправлении до компьютера. Но не будем забегать вперед и остановимся пока на земном. :) Мы будем управлять механической рукой, а точнее кистью. Немного о прошлом... Первая модель искусственной руки, управляемой биотоками, была создана в 1957 году. В последующие годы модель совершенствовалась. Участники проходившего в Москве 1-го Международного конгресса Федерации по автоматическому управлению стали очевидцами такой необычной картины. Пятнадцатилетний мальчик, лишившийся кисти руки, взял искусственной рукой кусок мела и написал на доске отчетливым почерком: «Привет участникам конгресса!» Кисть протеза, которой были выведены приветственные слова, казалась живой. Она сжималась и разжималась. Ее движениями управляли мышечные биотоки. Как будет работать рука... Работа такой «руки» основана на биотоках организма, т. е. токах, вырабатываемых в нервных клетках. Когда человек двигает рукой или ногой, в его мышцах возникают биотоки. Но человек может по своему желанию вызвать появление биотоков в мышце и регулировать их силу, не производя никаких движений. Достаточно лишь сигнала, приказа мозга: «Пусть мышцы сократятся». И обязательно возникает биоток определенной мощности. И это еще не предел совершенствованию... Теперь давайте перейдем от теории к практике. Первое с чего начнем описание-это создание кисти, повторяющей примитивные движения настоящей. Инженеры-механики изучают руку - совершеннейший инструмент природы. Ведь рука может иметь более 5 тыс. миллиардов различных состояний движений! Да, мы не оговорились, именно 5 тыс. миллиардов. И пока ни один механизм в мире из созданных человеком не может соперничать с мудрой природой. Да, мы не сможем собрать кисть, которая будет повторять хотя бы 100 таких движений. Это очень трудная штука, которую даже в специально оборудованной лаборатории так просто не собрать ! Идем дальше... Из чего же можно собрать кисть, а в основном пальцы ? В голову приходили разные мысли: конструкторы, игрушки, палочки, трубки, трубы от отопления(пластмассовые)...гофрированные шланги. Сначала нужно определиться с функциями. Что делают пальцы ? Нет, ...ковыряться в носу это можно, но мы не об этом ). Правильно, -пальцы должны что-то держать. В общем шевелиться, менять свое положение в пространстве., сгибаться/разгибаться в разные стороны. Нам нужны будут только две стороны сгиба-вперед-назад. Можно сделать пальцы из каркаса, какого-нибудь конструктора... Не, сразу вам скажу, -конструкторы не моя стихия. Я люблю другие пути. Лучше не брать готовое, а сделать это самому. Почему спросите ? Я вам отвечу: это интересно, познавательно, а так же это развивает вашу серую жидкость "которая вырабатывает эл. заряды и магнитные волны". Видите, даже тут мы уже видим как взаимодействует человек и машина ). Трубки в голову пришли от отопления(такие пластмассовые белые)... Но они не сгибаются. Вот проблема-то какая... Идем дальше. Кажется мы упоминали об гофрированных шлангах ? Да, точно ! То что надо. Если вы не помните или не знаете что такое гофрированные шланги-это такие шланги с рифлеными стенками для того чтобы их можно было сгибать не боясь преломления. Пример: противогаз с отдельным фильтром, пылесос. Но есть так же проблема- он слишком гибкий. Не будем унывать из-за этого. Есть выход. Есть еще один, очень распрастранненый вид гофрированных трубок-изоляторов. В такие "изоляторы" пропускают пачки проводов, кторые находясь в трубке, не боятся влаги и т.п. Отлично, мы нашли то что нужно ! Идем дальше... Мы определились из чего будят наши пальцы:
Тут тоже есть свои нюансы. Пластмасса-не резина. Нет, она конечно тоже может восстанавливать свою форму, но не так как резина. Если сильно сгибать пластмассу, то она может принять заданное ей положение, а это нам категорически не надо. Нам нужно чтобы пальцы сгибались и разгибались в стандартное положение(вертикальное). Но как ? Поставить пружинки...Нет, не вариант. Они могут тоже перетянуть в другую сторону. Этот вопрос мы пока оставим на время, и перейдем к механике сгибания пальцев Как сделать чтоб наша трубка сгибалась, причем не гнулась дугой, а именно прямыми сегментами... Для этого мы вырежем небольшую часть и посмотрим что будет при сгибании, как поведет себя трубка. Будем считать что проверили. И как я говорил, она не до конца сама разгибается. Тогда было принято решение-обтянуть нашу гофрированную трубку резинной для лучшей гибкости:
Но не так все оказывается легко. Резиновая трубка то она резиновая, но не растягивается так легко как мы хотели. Даже с использованием масла, она не поддается полностью, часть мы можем надеть без ощутимых деформаций, дальше только хуже,-все мнется и гнется, что потом не востановить. Тогда будем надевать трубку частями, по три штуки. Ведь наш палец состоит из трех сегментов...Видите как все прекрасно складывается, не зря мы стараемся, еще один "+" к опыту ). Даже выходит какое-то подобие кожи. Резина позволяет нам сгибать палец и разгибаться самостоятельно без проблем.
Дальше идет описание сборки пальцев:
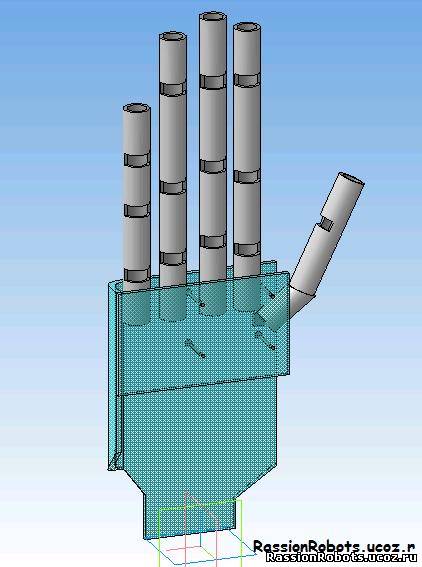
Делаем выводы, а точнее вот что у нас получается:
Автор: S-T-A-L-K-E-R (c) Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||
|
| ||














| Всего комментариев: 4 | |

| |

