13:32 M-TRAN (модульный робот) | ||
 Модульный робот принимает свой первый шаг "Модульный трансформер" (М-TRAN) 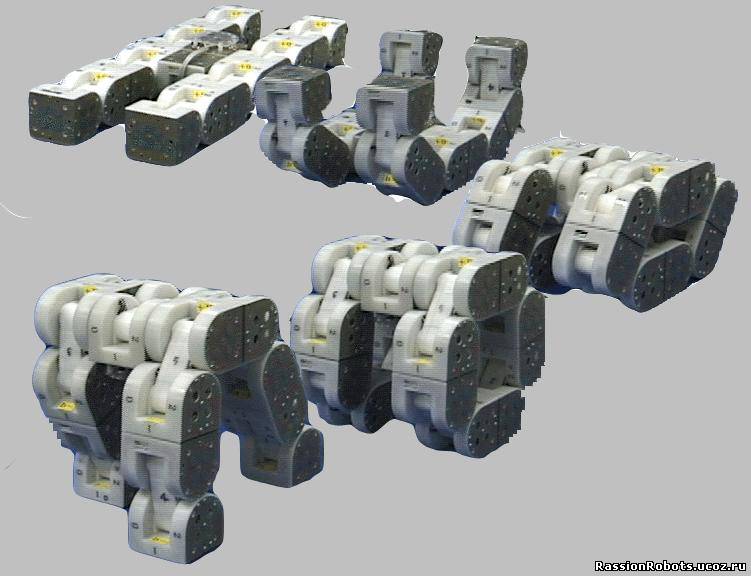 Исследовательская группа из Института интеллектуальных систем, АИСТ, разработала новый самоуправляющегося реконфигурируемого(меняющий свою структуру) модульного робота, называемого "модульный трансформер (M-TRAN) ". Она успешно реализовала многорежимное движения робота, изменив его форму. Эта технология, как ожидается, будет применяться для исследования планет, например Марс, спасательных робот, которые должны выполнять свои задачи в местах, недоступных для человека, путем адаптации к внешней среде. Self-реорганизация и самовосстановление модульного робота Робот состоит из "механических элементов", как в клетки в живых организмов. Они называются "модули" и такого рода роботы относятся к "модульным роботам". Поскольку модульный робот способен изменить свою структуру сам по себе, он может передвигаться и выполнять различные задачи по адаптации своей формы к внешней среде. Это называется "самостоятельная реорганизация" или "самосборка". Кроме того, в случае частичного повреждения одного модуля или его детали, робот состоит из идентичных модулей, которые могут восстанавливать себя, заменой неисправных или поврежденных частей, это называется "Self-восстановление".  Модульная конструкция Конструкция модуля несложна, что позволяет изменять форму для выполнения различной "3-D" структуры. 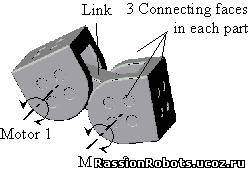 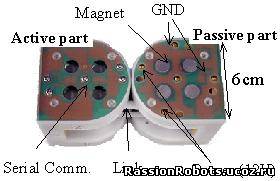 Модуль состоит из двух полу-цилиндрических частей, которые соединяются с помощью "ссылки"(соединительной детали) части. Каждая полу-цилиндрическая часть может вращаться на 180 градусов. ( демонстрирующий ролик ) По таком простом исполнении модуля и "умного" механизма связи, модуль получается легким и малогабаритным, что позволяет выполнять больше динамических движений из нескольких модулей.  Кроме того, электроды, расположенные на поверхности каждого соединения, служат для подключения питания и связи с компьютером. Связь электродов между модулями осуществляется при помощи трех проводов, подключенных извне для всех модулей, в то время как немалое количество проводов было необходимо для большинства роботов. Опыт самостоятельной реконфигурации модулей В следующем эксперименте, группа модулей реконфигурируется от гусеничного типа в четвероногий тип и движется. Это первый эксперимент в мире 3-D самоуправления реконфигурацией. ( демонстрирующий ролик ).  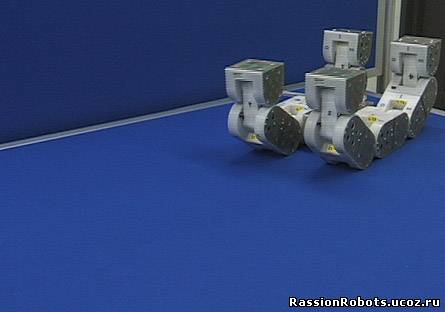    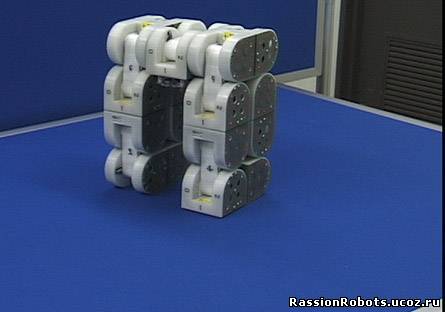   В этом опыте, движение всех модулей контролируются компьютером через кабель к одному из модулей. Из этого модуля команды распространяются на все остальные модули. Моделирование самоуправления реконфигурации Групповые модули можно перенастроить на несколько статичных структур, которые могут реализовать некоторые динамические движения в целом. Был создан "тренажер" для этого модульного робота и разработано несколько движений. Ниже приводится пример, когда робот из "блочной структуры" создается в "четвероногую структуру".        Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||
|
| ||

| Всего комментариев: 3 | |
|
| |
