01:47 ФАЗБОТ НА МИКРОСХЕМЕ | ||
 Фазбот - это робот, управляемый фазовым методом, с любого пульта дистанционного управления нажатием любой кнопки! Алгоритм управления позволяет поворачивать робота вправо или влево, что вполне достаточно для объезда препятствий. Робот снабжён тактильным датчиком, который предотвращает столкновение с предметами, фотосенсорами для движения за источником света. С помощью переключателя режимов можно задавать варианты поведения, например поиск источника света. Всего в алгоритме робота заложено 4 режима поведения. $CUT$Робот с фазированным управлением отлично подходит для организации соревнований, например слалом или движение по строго заданной траектории. Для выполнения этих на первый взгляд простых задач от вас потребуются навыки в управлении роботом и ловкость. |

1.ВИДЕОТЕСТЫ РОБОТА.
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
На видео.1 показано управление роботом от пульта дистанционного управления.
На видео.2 поиск источника света фазботом. В этом режиме робот едет по кругу ищет свет и передвигается за источником света.
На видео.3 робот движется за светом от фонарика, маневрирует. Когда источник света отсутствует робот останавливается.
На видео.4 тактильный датчик-ус обнаруживает препятствие, затем робот поворачивает в сторону.
ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми!
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link

Фото.1 нажимайте фото для увеличения.

Фото.2.
 Фото.3.нажимайте для просмотра в полном размере | КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА 1. Клемник винтовой двухсекционный. Разъём для подключения мотора M2. 2. Мотор M2 (QX-FF-130-14230). 3. Силовая рама (стеклотекстолит). 4.Винт для фиксации силовой рамы. Фиксирует соединение силовой рамы (с моторами) с основной печатной платой. 5. Передняя правая и левая опора из металлической скрепки. 6. Фототранзистор ФТ2К (позиция VT4). 7. Микропереключатель с металлической полоской. 8. Термоусадочная трубка. 9.Блоковый двухсекционный микровыключатель. Переключатель режимов. 10. Резонансный фотоприёмник TSOP1736. 11. Фототранзистор ФТ2К (позиция VT5). 12.Тактильный ус. Изготовлен из скрепки. Обнаружение объектов при столкновении. 13.Светодиоды красного цвета свечения диаметром корпуса 3мм. 14.Мотор M1 (QX-FF-130-14230). 16.Клемник винтовой
двухсекционный. Разъём для
подключения мотора M12.15.Резиновый протектор на валу мотора для увеличения сцепления с поверхностью. 17.Силовая рама. 18.Провод "питание 4,5В" от футляра для батареек. 19.Клемник винтовой двухсекционный. Подключение источника питания. 20.Микропереключатель трёхвыводной. Выключатель питания. На фото.4 показаны некоторые компоненты из
списков компонентов конструкции робота. Все обозначенные номера
смотрите по списку выше. Фото.4. |

4.ДЕТАЛИ И МАТЕРИАЛЫ.
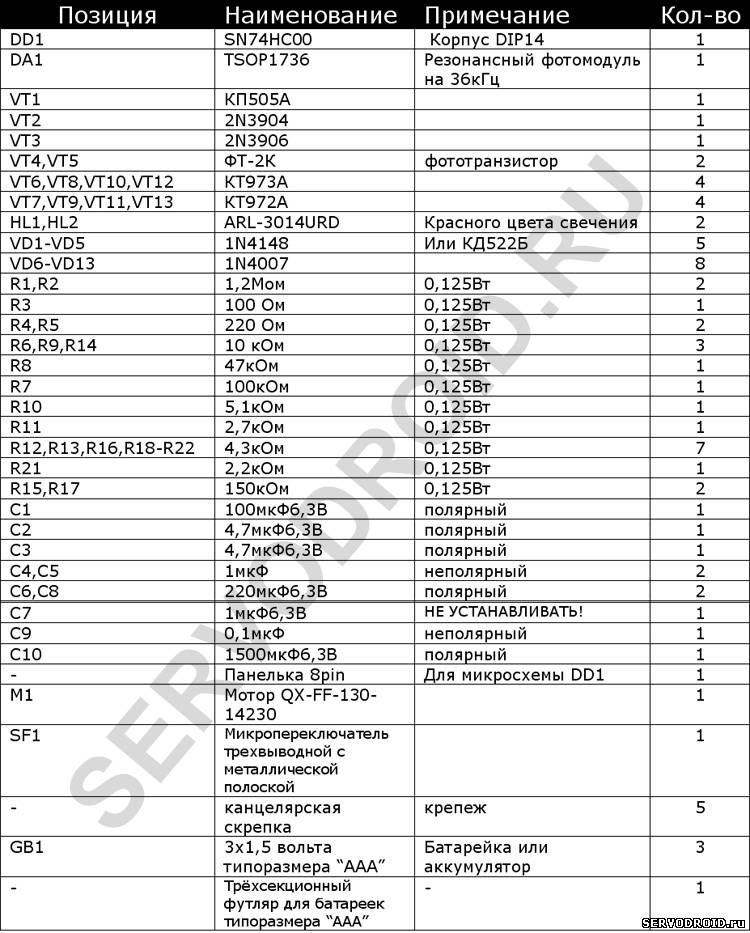
Монтаж радиокомпонентов выполняется по приведённому чертежу на рис.2. Все резисторы отечественные или импортного производства мощностью 0,125Вт. Номиналы резисторов и конденсаторов должны соответствовать указанным на схеме. Конденсатор C7 на печатную плату не устанавливать!
Футляр для батареек типоразмера "AAA". При отсутствии разъёмов XT1,XT2,XT3 можно не устанавливать. В этом случае выводы от моторов M1,M2 и выводы от источника питания запаивают непосредственно в отверстия для разъёмов.
5.ИНСТРУКЦИЯ ПО СБОРКЕ РОБОТА.
1.Изготовление печатной платы.
 Фото.5. |  Фото.6. |
Распечатайте сборочный (монтажный) чертёж (рис.2). Вырезайте его по контуру и наклейте используя сухой клеевой карандаш на поверхность изготовленной печатной платы, со стороны установки радиокомпонентов. Это необходимо для того, чтобы легче было ориентироваться при установке радиокомпонентов на позиции. В авторском варианте такая работа не проводилась.

Вывод эмиттера выходных транзисторов VT6-VT13 помечены на монтажном чертеже (рис.2) красной точкой. При отсутствии разъёмов (винтовых клемников) их можно не напаивать. Но в этом случае вам придётся припаивать выводы от моторов и футляра батарейки непосредственно к печатной плате.
Микропереключатель (позиция SF1) установите и напаивайте горизонтально со стороны токоведущих дорожек.
3.Монтаж стоек и силовой рамы.
Силовая рама будет соединяться при помощи двух стоек с печатной платой (фото.7). Каждая из стоек состоит из винта марки M3 (1), пластиковой трубочки (2), шайбы (3) и гайки (4). На фото.7 показаны размеры пластиковой трубочки. Её длинна 15мм, диаметр 5мм. Трубочку изготавливают из подходящей части пишущего узла шариковой ручки. На фото.8 показана печатная плата с выполненным монтажом радиокомпонентов и установленными стоками.
 Фото.7. | 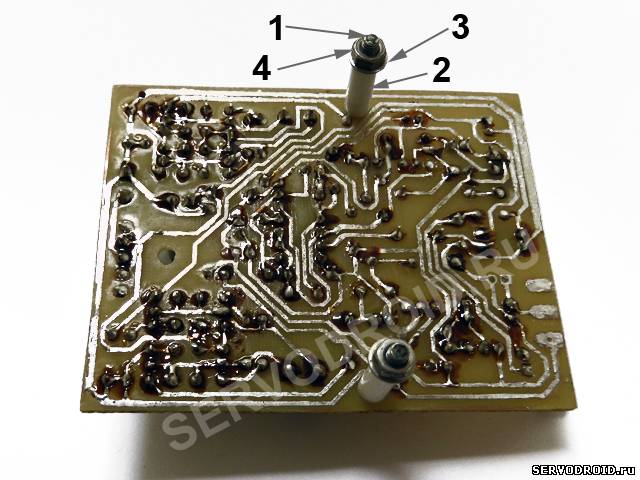 Фото.8. |
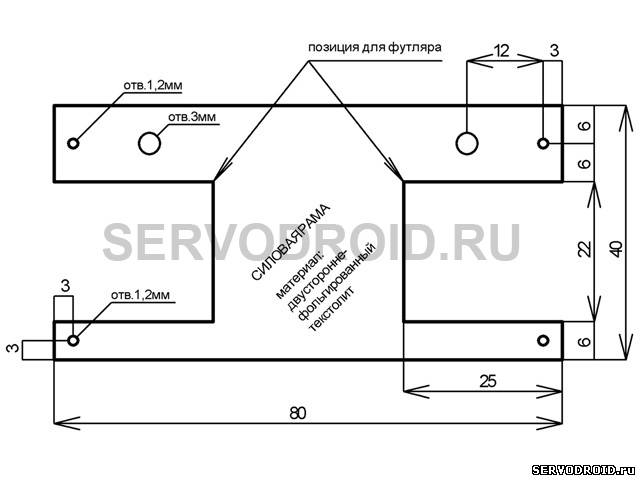 Рис.3. |  Фото.9. |
 Фото.10. |  Фото.11 |
На внешнюю часть поверхностей (левой и правой) укладываем прямоугольники из двустороннего скотча толщиной не менее 1мм. (фото.12). Этот скотч будет удерживать моторы во время монтажа и в последующем при фиксации предотвратит проскальзывание двигателя в креплениях.
Подготовьте крепёж из металлической скрепки (она должна быть достаточной длины) по приведённой фотографии. Для этого её необходимо с начало выгнуть в линию, а затем придать необходимую форму. Все этапы придания формы скрепки показаны на фото.13. Затем поместите скрепку на силовую раму как показано на фото.
 Фото.12. |  Фото.13. |
Выполните пайку мест сгибов скрепки (показано чёрными стрелками) к лужёной поверхности стеклотекстолита (фото.14, фото.15).
Зачистите и залудите боковые участки моторов с каждой стороны (фото.14 на область указывают синие стрелки). Установите моторы на наклонные поверхности так, чтобы верхняя кромка мотора была примерно на одном уровне с верхней кромкой данной поверхности. Прижмите мотор к липкой части двустороннего скотча.
 Фото.14. |  Фото.15. |
Предварительно зачищайте и лудите участки скрепки, предназначенные для крепежа и фиксации. Подгибайте скрепку-крепёж плоскогубцами к боковым отлуженным частям моторов и припаивайте (фото.16). Чтобы процесс пайки прошёл быстро и без сильного нагрева моторов используйте жидкий нейтральный флюс.
После пайки скрепки к боковым частым мотора необходимо запаять часть скрепки расположенную на тыльной стороне крепёжной поверхности (фото.17). На фотографии показано как это сделать правильно.
 Фото.16. |  Фото.17. |
Силовая рама устанавливается под днищем робота, расширенной частью вперёд. Соединения между силовой рамой и платой выполняют длинными винтами продетыми через стойки-трубочки. До присоединения силовой рамы к печатной плате, установите футляр для батареек на силовую раму(позиция указана на рис.3). Батарейки типоразмера "AAA" (мизинчиковые) напряжением 1,5 вольта каждая должны быть размещены в футляре. После этого зафиксируйте соединение частей робота гайками.
Изготовьте две одинаковые передние опоры из канцелярских скрепок по фото.18. Лудите тупую поверхность скрепки удерживая её с помощью монтажных плоскогубцев. Припаяйте опоры слева и справа на углах силовой рамы (фото.19).

6.НАСТРОЙКА РОБОТА.
Если все этапы сборки выполнены верно, монтаж выполнен без ошибок, робот не требует настройки и начинает работать сразу после включения. В этом случае можно пропустить дальнейшие рекомендации по настройке.
1. ПРОВЕРКА
МИКРОСХЕМЫ НА КАЧЕСТВО ПАЙКИ.
Рекомендуется пропаять выводы микросхемы 4,5,6,11,12,13.
2. ПРОВЕРКА
ФОТОМОДУЛЯ НА РАБОТОСПОСОБНОСТЬ.
Подключить параллельно резистору R10 светодиод зелёного цвета свечения так, чтобы его катод(-) был подключен к стоку полевого транзистора VT1, а анод(+) к плюсу источника питания. После включения питания (не подавайте ик-сигнал!) светодиод должен светиться. Нажмите кнопку ПУ светодиод должен гаснуть на время удержания кнопки ПУ.
Если светодиод не светиться при включении питания или не гаснет при нажатии кнопки ПДУ, то неверно напаян полевой транзистор (позиция VT1) или неисправен фотомодуль TSOP1736, возможны обрывы, короткие замыкания токоведущих дорожек в области этих радиоэлементов.
3. ПРОВЕРКА
РОБОТА ПРИ ДВИЖЕНИИ ВПЕРЁД.
Замкните секции микроблокового выключателя: для SA2.1 выводы 1 и 2 перемычкой и для SA2.2 выводы 3 и 4 также перемычкой. Робот должен двигаться вперёд. Если он не едет вперёд, а движется назад, то поменяйте подключение для моторов валы которых вращаются в противоположном направлении.
Если оба мотора не включаются, то причина в неверной установке на позиции транзисторов VT6-VT13, возможны короткие замыкания на печатной плате в цепи подключения указанных транзисторов.
4. ПРОВЕРКА
УПРАВЛЕНИЯ ОТ ПДУ.
Не убирайте перемычки установленные на секции микроблокового выключателя SA2.1 и SA2.2. Возьмите пульт от телевизора и нажимайте любую кнопку одновременно с зажиганием правого светодиода. При этом должен выключаться правый мотор. Если нажимать кнопку ПДУ при зажигании светодиода расположенного слева, то будет отключаться левый мотор. Если все проверки описанные в пунктах 1-3 выполнены, то робот будет правильно реагировать на сигнал от ПДУ.
Если этого не происходит, значит вы пропустили один из пунктов настройки (п.1-3) описанных выше.
5. ПРОВЕРКА
ПОИСКА ИСТОЧНИКА СВЕТА.
Если вы устанавливали перемычки на секции микроблокового выключателя SA2.1,SA2.2, то удалите их. Осветите лучом света, например от фонарика фототранзисторы VT4,VT5. Если освещаются оба фототранзистора, то робот едет вперёд. Если осветить только правый фототранзистор (или на него падает больше света), то робот поворачивает вправо. Если осветить только левый фототранзистор (или на него падает больше света), то робот поворачивает влево.
Если этого не происходит, то проверьте правильность установки фототранзисторов на позиции или замыканий припоем со стороны токоведущих дорожек рядом с ними.
7.ВКЛЮЧЕНИЕ РОБОТА

Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
автор Алексей Высоковольтный www.servodroid.ru
© Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований.
Мы очень рады,
что наши статьи помогут тебе - начинающему робототехнику, освоить эту интереснейшую сферу и прокачать свой скилл в этом направлении. Также хотим отметить, что по данным статьям мы - разработчики сайта SERVODROID проводим занятия в бесплатных кружках робототехники, и нам очень нравится учить и рассказывать что такое BEAM-робототехника всем желающих.
Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;)
Начни общаться на нашем Форуме или Онлайн-чате
[ Стать участником сайта / Авторизоваться ]
| Всего комментариев: 3 | |
|
| |



