
Сайт "Робототехника-наше будущее..." начинает набор участников для "Открытых Offline соревнований по робототехнике", в направлении "Следование по линии". Приглашаются все желающие, возраст не ограничен.
Условия состязания:
С 18. 09. 2010 по 31. 10. 2010 вам предоставляется возможность найти схему, собрать и отладить вашего робота. Сроки проведения могут измениться.
ВНИМАНИЕ участникам ! По просьбе участников было решено продлить соревнования до 17.11.2010 ! Время еще есть собрать своего робота, торопитесь ...
Что требуется от вас: распечатать трассу ( СКАЧАТЬ ТРАССУ ), снять видео, выложить его на YouTube, прислать на E-mail: melnik1412@yandex.ru ссылку на видео, и небольшое описание своего робота, ждать и надеяться на победу ! А еслы вы заинтересовались, то и пригласить своих друзей.

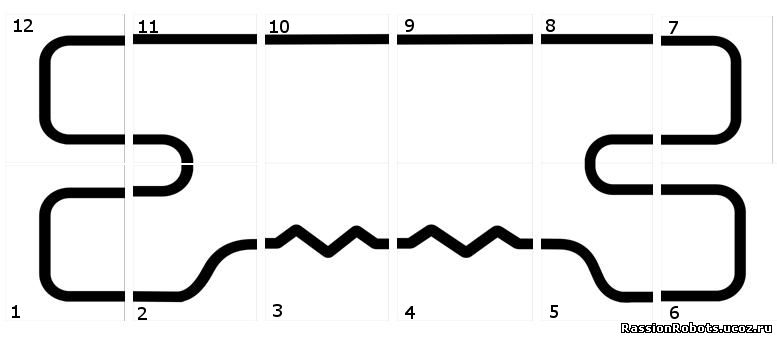
Трасса:
- цвет полигона - белый.
- цвет линии – черный.
- ширина линии - 20 мм, размер всего трека - 12 листов А4
Правилами разрешен отступ по 5 мм от краев ! Если будет выявлено что эти размеры завышены, участник снимается с соревнования.
Робот:
- максимальная ширина робота 30 см, длина - 30 см. (!)поправка от 29 сентября 2010 г)
- робот должен быть автономным.
Правила отбора победителя:
- на прохождение дистанции каждой команде дается неограниченное количество попыток.
- в зачет принимается лучшее время из попыток.
- победителем будет объявлена команда, потратившая на преодоление дистанции наименьшее время.
Призы:
- автору, чей робот проехал трассу за самое короткое время, назначается денежный приз в 300 руб (перевод черех ЯндексДеньги или WebMoney).
На этой странице будет выложены видеоролики с описанием робота, и время прохождения трассы.
| Пример. Краткое описание робота. |
Автор: Алексей Высоковольтный. Время прохождения трассы: 00 мин 12 сек 00 мс. Описание: специально разработан для прохождения трассы. С ним можно проводить соревнования на скорость прохождения выбранной трассы. Трассы можно использовать как стандартные, так и придуманные самостоятельно. Алгоритм передвижения позволяет роботу проходить простые лабиринты.
|
Автор: Isotope. Время прохождения трассы: 00 мин 50 сек 49 мс. Микроконтроллер: Picaxe 28x1, в качестве сенсоров использовались QRD1114. Корпус - сломанный утюг :) Я старался сделать так, чтоб с виду ничто не выдавало его "модифицированности", и я считаю что у меня это получилось :) Подробная информация и фотографии робота можно найти по ссылке http://letsmakerobots.com/node/17559 |
|